VoxelGridLargeScale¶
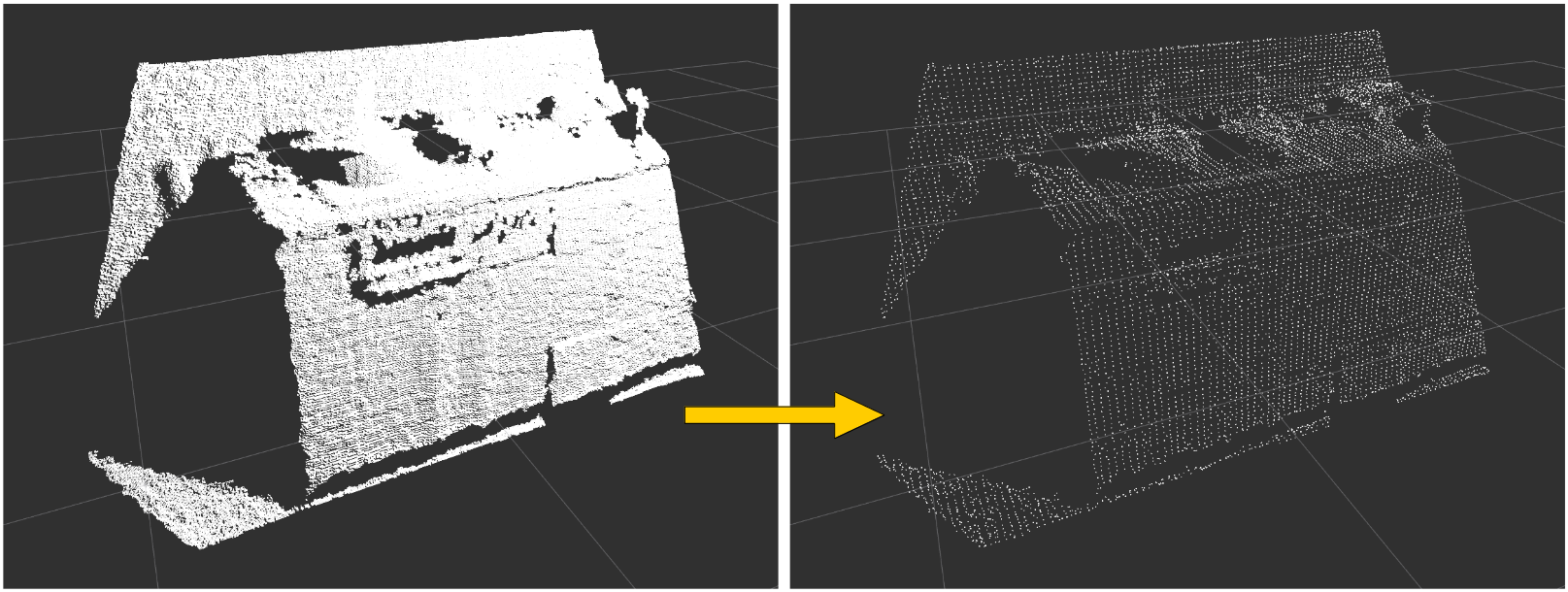
VoxelGrid downsampler which can handle small leaf_size.
Only supports pcl::PointXYZ.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input cloud
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Output downsampled cloud
Parameters¶
~leaf_size(Float, default:0.01)Size of voxel grid.
Sample¶
roslaunch jsk_pcl_ros sample_voxel_grid_large_scale.launch