MaskImageFilter¶
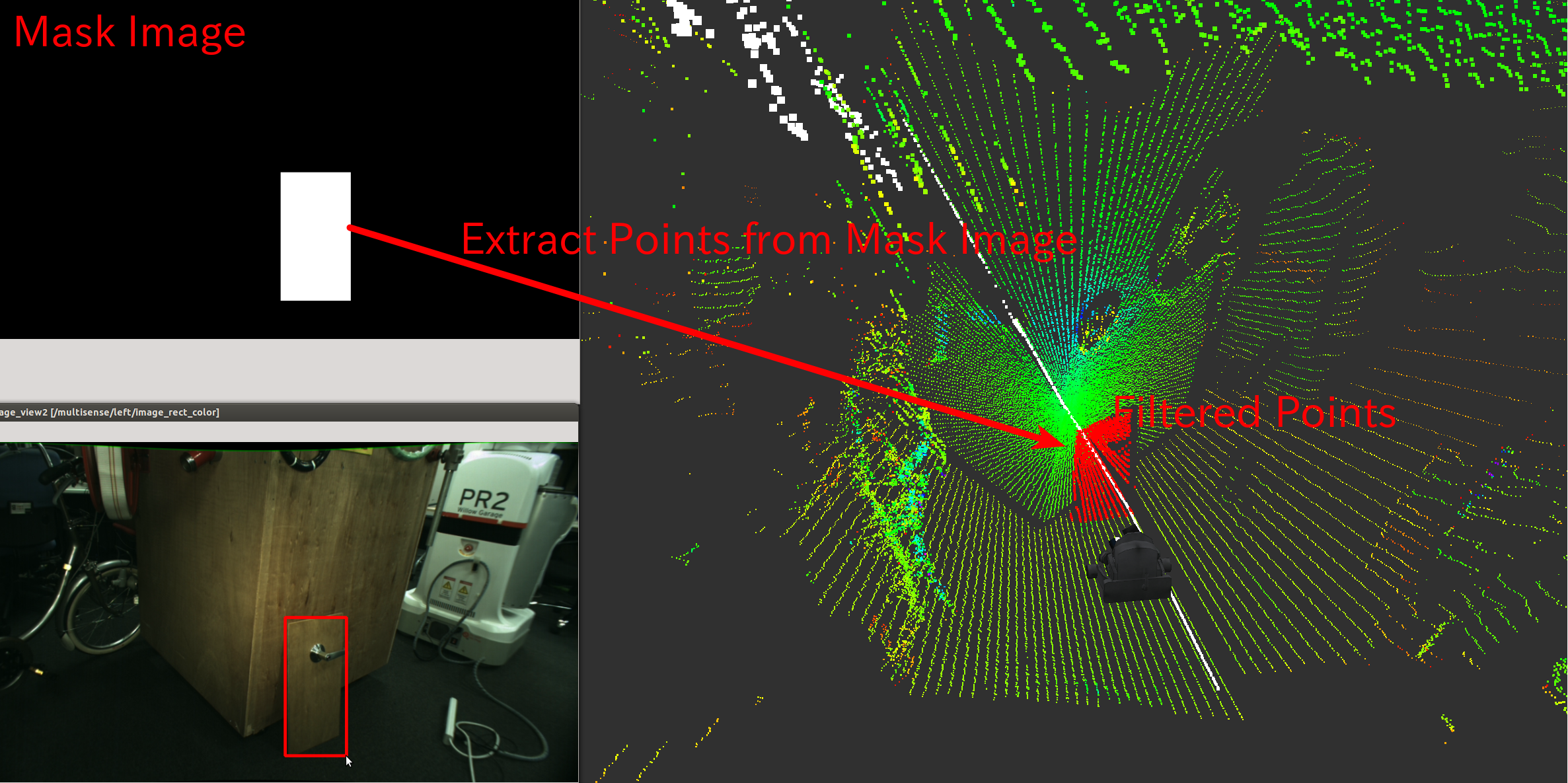
Extract indices of pointcloud which is masked by mask image. The pointcloud is no need to be organized.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud to be filtered.
~input/mask(sensor_msgs/Image)Mask image.
~input/camera_info(sensor_msgs/CameraInfo)Camera parameters of the mask image.
Publishing Topic¶
~output(pcl_msgs/PointIndices)Indices of the points masked by
~input/mask.
Parameters¶
~negative(Bool, default:false)Flip the max region of mask image or not.
Sample¶
roslaunch jsk_pcl_ros sample_mask_image_filter.launch