SupervoxelSegmentation¶
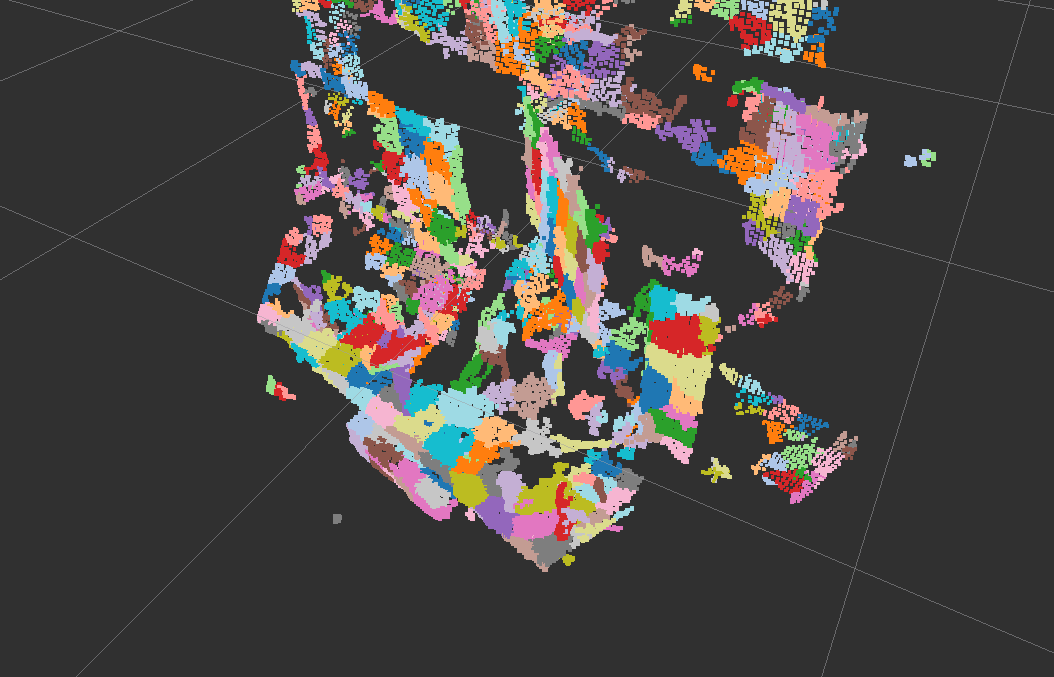
Segment pointcloud based on Supervoxel technique. see Voxel Cloud Connectivity Segmentation - Supervoxels for Point Clouds (J. Papon et al. CVPR2013).
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. It should have rgb field.
Publishing Topic¶
~output/cloud(sensor_msgs/PointCloud2)Output pointcloud downsampled by voxel grid.
~output/indices(jsk_recognition_msgs/ClusterPointIndices)Clustering result.
Parameters¶
~color_importance(Double, default:0.2)Color importance factor.
~spatial_importance(Double, default:0.4)Spatial importance factor.
~normal_importance(Double, default:1.0)Normal importance factor.
~use_transform(Boolean, default:True)Use single cloud transform
~seed_resolution(Double, default:0.1)Seed resolution of super voxels.
~voxel_resolution(Double, default:0.008)Voxel grid resolution of super voxels.
Sample¶
roslaunch jsk_pcl_ros sample_supervoxel_segmentation.launch