FindObjectOnPlane¶
What Is This¶
List up bounding parallelogram of input 2D mask image using 3D plane normal coefficients, and choose the minimum area from them.
Subscribing Topic¶
~input(sensor_msgs/Image)Input mask image.
~input/camera_info(sensor_msgs/CameraInfo)Input camera info.
~input/coefficients(pcl_msgs/ModelCoefficients)Input normal coefficients of plane.
Publishing Topic¶
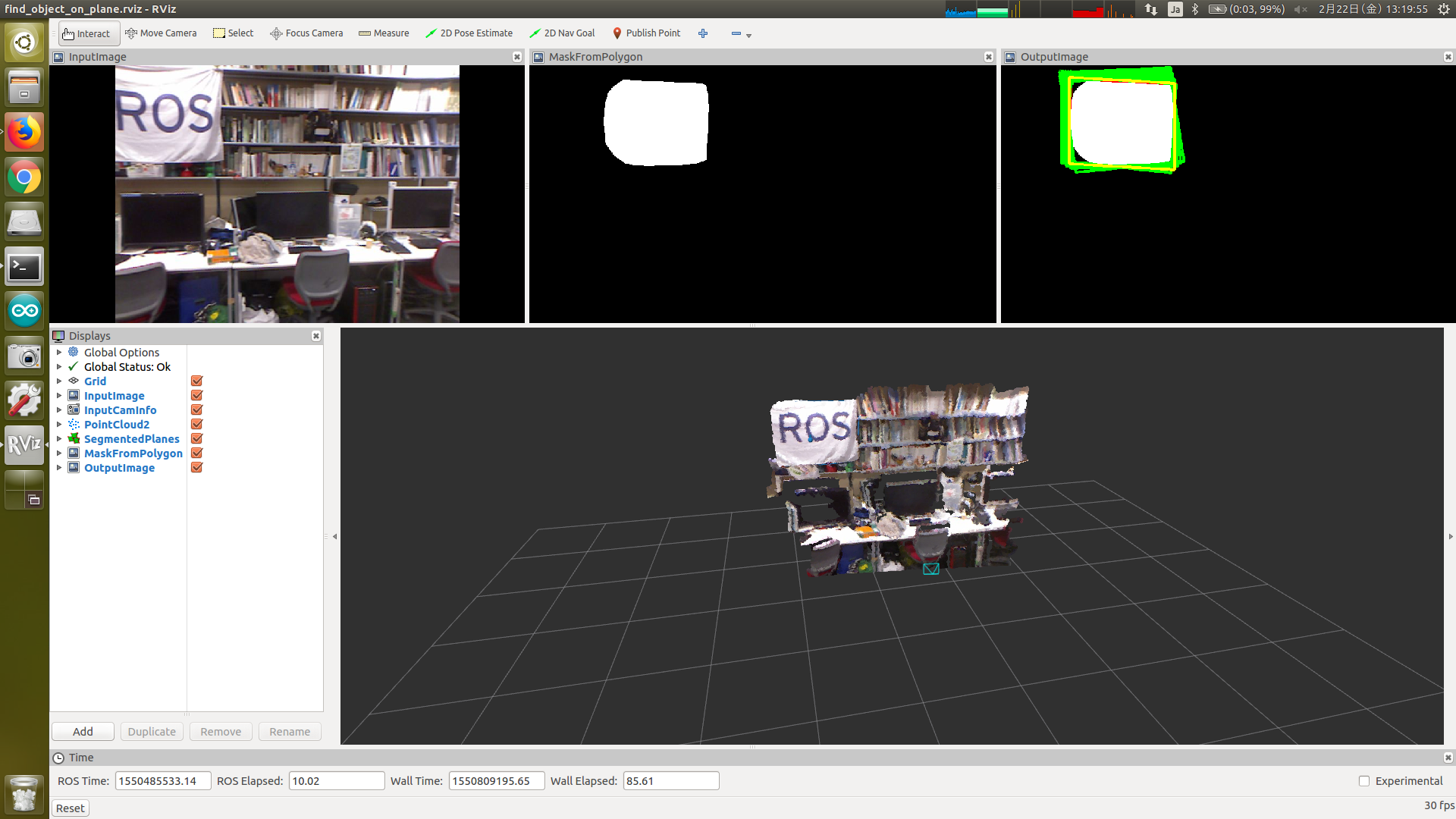
~debug/min_area_rect_image(sensor_msgs/Image)Visualization of minimum bounding parallelogram of mask.
Red rectangle is aligned to x and y axis.
Green parallelograms are bounding parallelograms of mask.
Yellow parallelogram is the bounding parallelogram which is estimated to be minimum.
Sample¶
roslaunch jsk_pcl_ros sample_find_object_on_plane.launch