depth_error_calibration.py¶
What Is This¶
This nodelet stores result of depth error calculated by
DepthImageError and
dump calibration parameter into CSV file (calibration-%Y-%m-%d-%H-%M-%S.csv).
Subscribing Topic¶
depth_image_error/output(jsk_recognition_msgs/DepthErrorResult)Result of depth error.
Publishing Topic¶
~frequency_image(sensor_msgs/Image)Frequency map.
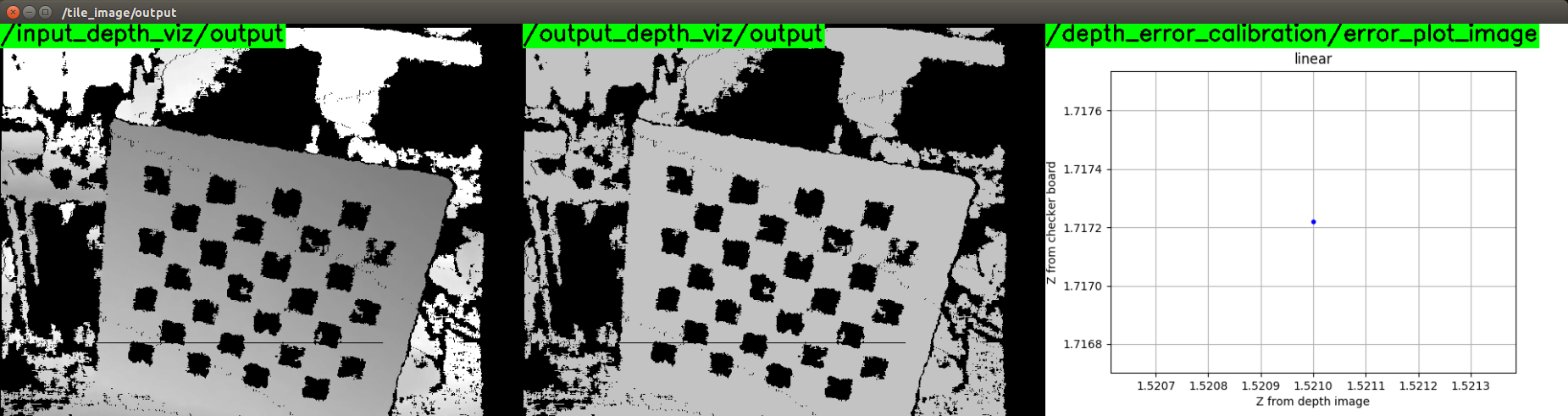
~error_plot_image(sensor_msgs/Image)Plot of relation between Z from depth image and Z from checker board.
Internally Calling Service¶
/camera_remote/depth_calibration/set_calibration_parameter(jsk_recognition_msgs/SetDepthCalibrationParameter)Set depth calibration parameters.
Parameter¶
~u_min(Int, default:0)~u_max(Int, default:4096)~v_min(Int, default:0)~v_max(Int, default:4096)Minimum/maximum limit of (u, v) of checkerboard corner.
Sample¶
roslaunch jsk_pcl_ros sample_depth_error_calibration.launch