Depth Camera Calibration(Kinect,Xtion,Primesense)¶
Two Main Steps:¶
1. Camera Intrisic Calibration: Intrisic CalibrationPlease refer to ros RGB camera calibration tutorial>> ros wiki2. Depth Calibration: Depth Calibrationrelated to the distance z, optical frame pixel u v and global pixel offset.
You need:¶
Chessboard: Make sure ur Application Range, if u wanna use camera in short range(0.5m~2m) choose small chessboard, otherwise plz choose a larger one.
Depth Camera: Kinect one, Xtion, Primesense. (There may be some problem when using primesense, check here to install the newest openni2, perhaps u need to do
apt-get remove libopenni2-0first)Good PC with ubuntu and ros installed: We only tested in Lenovo thinkpad series.
jsk_pcl_ros: jsk package
Camera Intrisic Calibration:¶
Please follow this tutorial and when u finished calibration(4 features become green), wait patiently until u can click upload, calibration file will be right there in
~/.ros/camera_info/***.yamlwaiting. Check theopenni2_launch.launchfile oropenni2_local.launchif u use JSK package to edit the path.For Details Please Refer to this
Zhang, Zhengyou. "A flexible new technique for camera calibration." Pattern Analysis and Machine Intelligence, IEEE Transactions on 22.11 (2000): 1330-1334.
Depth Calibration(Available only in jsk_pcl_ros package):¶
We assume the intrisic calibration has been performed well.
Plug in ur depth camera to your favourite USB port and run
roslaunch jsk_pcl_ros openni2_local.launchandroslaunch jsk_pcl_ros openni2_remote.launch(Load the camera intrisic calibration file)Do
roscd jsk_pcl_rosandcd launch, find filedepth_error.launchand edit paramrect0_size_xrect0_size_yandgrid0_size_xgrid0_size_yaccording to your chessboard. Thenroslaunch jsk_pcl_ros depth_error.launchDo
rosrun rviz rvizand subscribe to 3 topics(two pointcloud2 and one Pose)
Pose
/checkerdetector/objectdetection_poseRaw Pointcloud
/camera_remote_uncalibrated/depth_registered/pointsCalibrated Pointcloud
/camera_remote/depth_registered/points
You will see the Error between Pose(Estimated by rbg camera while looking at chessboard) and uncalibrated pointcloud.
Open another Terminal and run
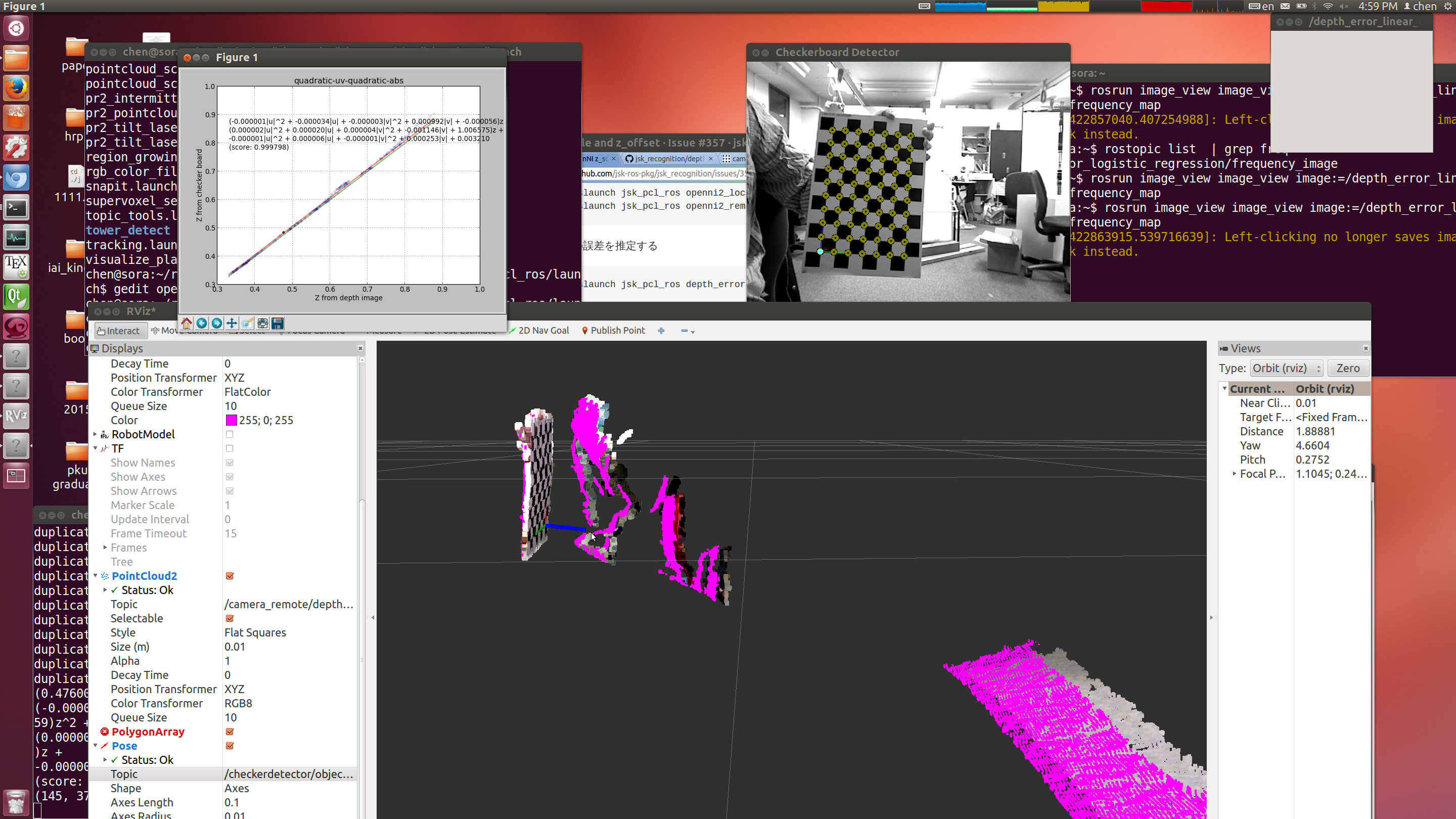
rosrun jsk_pcl_ros depth_error_calibration.py --model quadratic-uv-quadratic-absand move the chessboard slowly while watching to the image window. The edges of the image should be covered and the range(due to your application) should also be covered as more as possible.Open new Terminal and run
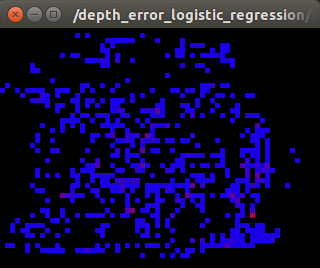
rosrun image_view image_view image:=/depth_error_logistic_regression/frequency_image. You can observe which point the chessboard passes on the window. If it never apeears, settingapproximate_syncinjsk_pcl_ros/launch/depth_error.launchto true might help you. (Please see the example below.)
<node pkg="jsk_pcl_ros" type="depth_image_error"
name="depth_image_error"
output="screen">
<remap from="~image" to="$(arg DEPTH_IMAGE)" />
<remap from="~point" to="/checkerdetector/corner_point" />
<remap from="~camera_info" to="$(arg CAMERA_INFO_TOPIC)" />
<rosparam>
approximate_sync: true
</rosparam>
</node>
Checking the window output and the Rviz output when you find the calibrated pointcloud overlaps the Pose vector.
Ctrl+cin this Terminal and enteryto save the calibration file. Editopenni2_remote.launchfile and find the paramdepth_calibration_file, add the path of your calibration file.Finish and Check it again.