CaptureStereoSynchronizer¶
What Is This¶
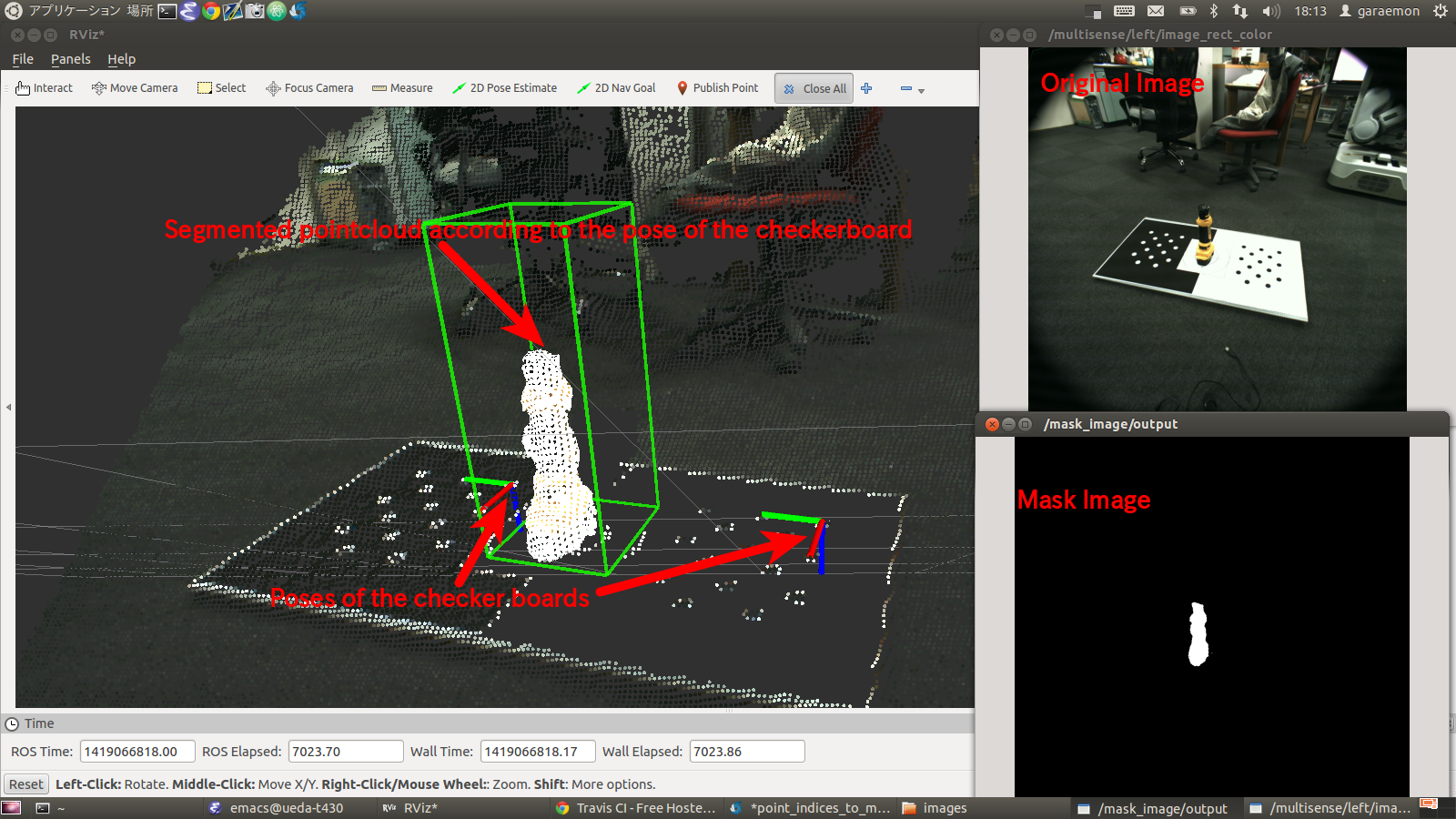
A nodelet to capture training data of stereo cameras. It subscribes several messages with
synchronizing timestamp and republish them into ~output namespace.
Subscribing Topic¶
~input/pose(geometry_msgs/PoseStamped)Pose of checkerboard
~input/mask(sensor_msgs/Image)Mask image of the object
~input/mask_indices(pcl_msgs/PointIndices)Pointcloud indices of the object
~input/left_image(sensor_msgs/Image)Left camera image
~input/left_camera_info(sensor_msgs/CameraInfo)Left camera parameter
~input/right_camera_info(sensor_msgs/CameraInfo)Right camera parameter
~input/disparity(stereo_msgs/DisparityImage)Disparity image of the stereo camera.
Publishing Topic¶
~output/pose(geometry_msgs/PoseStamped)~output/mask(sensor_msgs/Image)~output/mask_indices(pcl_msgs/PointIndices)~output/left_image(sensor_msgs/Image)~output/left_camera_info(sensor_msgs/CameraInfo)~output/right_camera_info(sensor_msgs/CameraInfo)~output/disparity(stereo_msgs/DisparityImage)These topics are the same message to the
~input/foomessages but all of them are republished only if input messages are synchronized.~output/count(std_msgs/Int32)Number of sample.
If
~input/poseis near from any previously stored poses, then republishing input topics will be skipped.
Parameters¶
~rotational_bin_size(Float, default:0.175)Minimum allowable rotational pose difference between new pose and all stored poses in radians.
~positional_bin_size(Float, default:0.1)Minimum allowable positional pose difference between new pose and all stored poses in meters.
Sample¶
roslaunch jsk_pcl_ros sample_capture_stereo_synchronizer.launch