AttentionClipper¶
What Is This¶
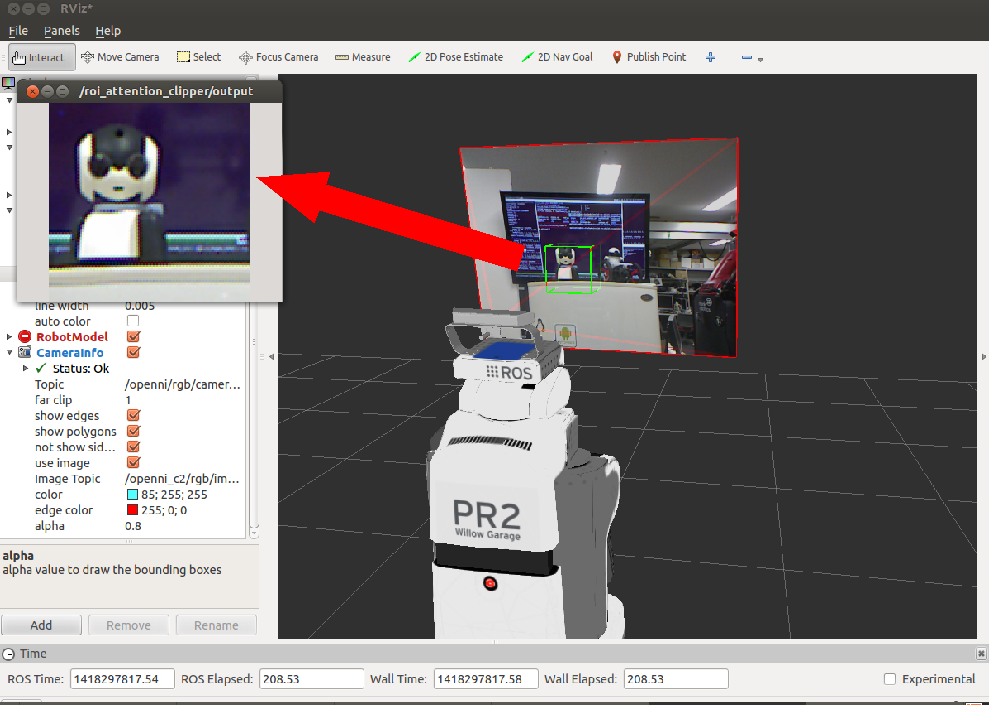
It retrieves sensor_msgs/CameraInfo and publish sensor_msgs/CameraInfo with ROI filled and
retrieves sensor_msgs/PointCloud2 and publish pcl_msgs/PointIndices.
You can specify the pose and size of the interest bounding box and jsk_pcl/AttentionClipper returns ROI to see the object.
Note¶
AttentionClipper does not work properly on Kinetic + PCL 1.8.0, and you can avoid the problem with SSE disabled PCL.
Please see here for more information.
Original issue: attention_clipper does not work properly on Kinetic + PCL1.8.0
Subscribing Topic¶
~input(sensor_msgs/CameraInfo)Original camera info. (You don’t need camera info when you only use pointcloud.)
~input/points(sensor_msgs/PointCloud2)Original pointcloud.
~input/pose(geometry_msgs/PoseStamped)~input/box(jsk_recognition_msgs/BoundingBox)Specify the pose of the bounding box. Timestamp will be ignored and camera info’s timestamp will be used. If you use
~input/box, you can change the size of attention region. There callbacks are only enabled if~use_multiple_attentionis false.~input/pose_array(geometry_msgs/PoseArray)~input/box_array(jsk_recognition_msgs/BoundingBoxArray)It’s an array version of
~input/poseand~input/box. There callbacks are only enabled if~use_multiple_attentionis true.
Publishing Topic¶
~output(sensor_msgs/CameraInfo)This camera info is same with
~inputexcept for roi field. (only when~inputis published.)~output/box_array(jsk_recognition_msgs/BoundingBoxArray)Array of bounding boxes representing the interest regions.
~output/mask(sensor_msgs/Image)Mask image to mask the regions of specified interest. (only when
~inputis published.)~output/point_indices(pcl_msgs/PointIndices)Indices of
~input/pointswhich are inside of interest regions.~output/cluster_point_indices(jsk_recognition_msgs/ClusterPointIndices)Cluster point indices of
~input/pointswhich are inside of interest regions.
Parameter¶
~use_multiple_attention(Boolean, default:False)If you want to enable multiple attentions, please set this variable True.
~dimension_x(Double, default:0.1)~dimension_y(Double, default:0.1)~dimension_z(Double, default:0.1)Size of bounding box. Available only if
~use_multiple_attentionis false.~frame_id(String, default:base_link)Frame id of attention region. Available only if
~use_multiple_attentionis false.~initial_pos(Array of double, default:None):Initial pose of interesting region. Available only if
~use_multiple_attentionis false.~initial_rot(Array of double, default:None):Initial orientation of interesting region. The value should be represented in [roll, pitch, yaw]. Available only if
~use_multiple_attentionis false.~initial_pos_list(Array of array of double, default:None)~initial_rot_list(Array of array of double, default:None)~frame_id_list(Array of string, default:None)~dimensions(Array of array of double, default:None)~prefixes(Array of string, default:None)Position, Rotation, frame id ,prefix and Dimensions of multiple attention regions respectively.
~iniital_pos_listshould follow[[x, y, z], ...],~initial_rot_listshould follow[[rx, ry, rz], ...]and~dimensionsshould follow[[x, y, z], ...].~prefixes[prefix1, prefix2, ...]. These prefixes will add to the /point_indices and advertise Available only if~use_multiple_attentionis true.~negative(Boolean, default:False)Publish points which are not inside of attention regions if this parameter is true.
For use¶
If you want to get PointCloud2 which are inside of interest regions, you should use ExtractIndices node like in sample_attention_clipper.launch.
Sample¶
roslaunch jsk_pcl_ros sample_attention_clipper.launch