LINEMODDetector¶
What Is This¶
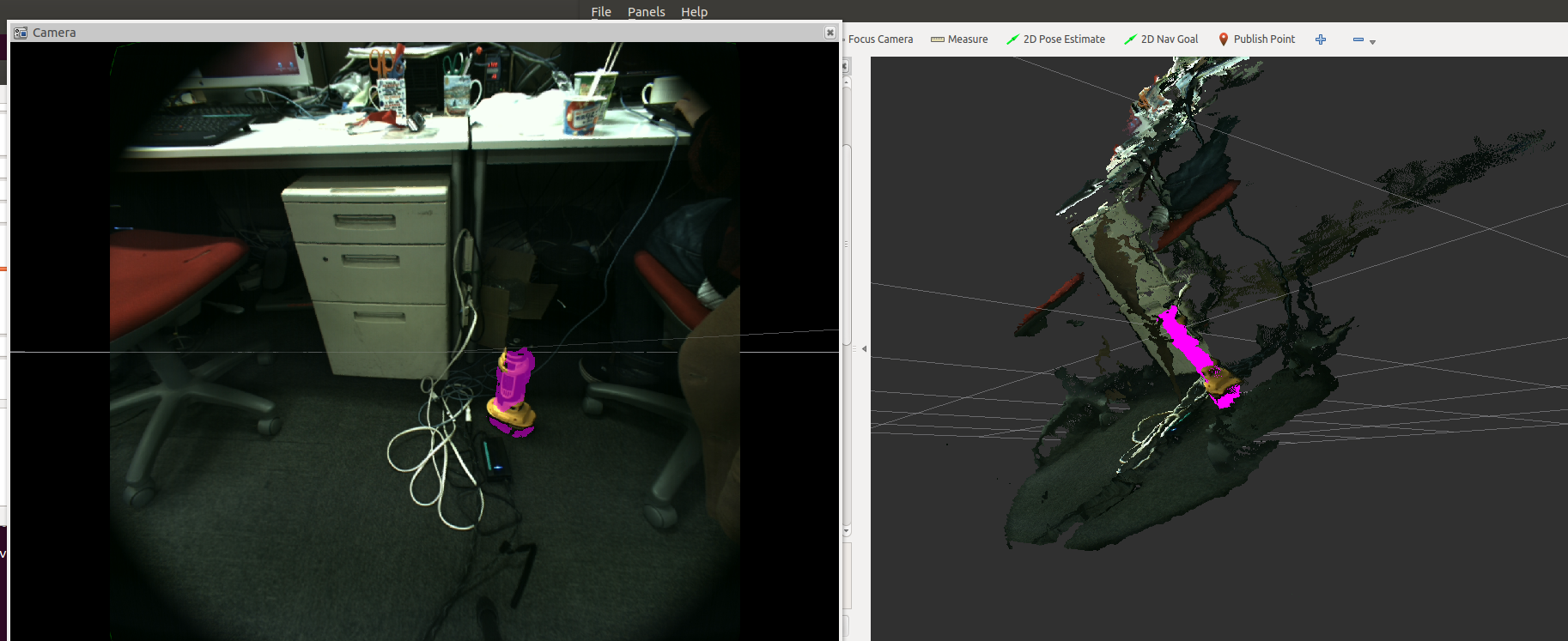
A nodelet to detect object using LINEMOD.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Result of detection as pointcloud.
~output/mask(sensor_msgs/Image)Result of detection as mask image.
~output/pose(geometry_msgs/PoseStamped)Pose of detected template
~output/template(sensor_msgs/PointCloud2)Template pointcloud at identity pose.
Parameters¶
~template_file(String, default:template)Path to template files (
.pcdand_poses.yaml).e.g.) If the templates are
/foo/bar.pcdand/foo/bar_poses.yaml, then this parameter should be/foo/bar.~gradient_magnitude_threshold(Double, default:10.0)Gradient magnitude threshold
~detection_threshold(Double, default:0.75)Detection threshold
Sample¶
roslaunch jsk_pcl_ros sample_linemod_detector.launch