OrganizedStatisticalOutlierRemoval¶
Organized version of statistical outlier removal.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud to be removed outlier.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Output pointcloud.
Parameter¶
~keep_organized(Boolean, default:True)keep organized point cloud or not
~negative(Boolean, default:False)remove outlier or remove other than outlier.
~mean_k(Int, default:2)mean k value for statistical outlier removal.
~stddev(Double, default:0.0)std deviation multipelier for statistical outlier removal.
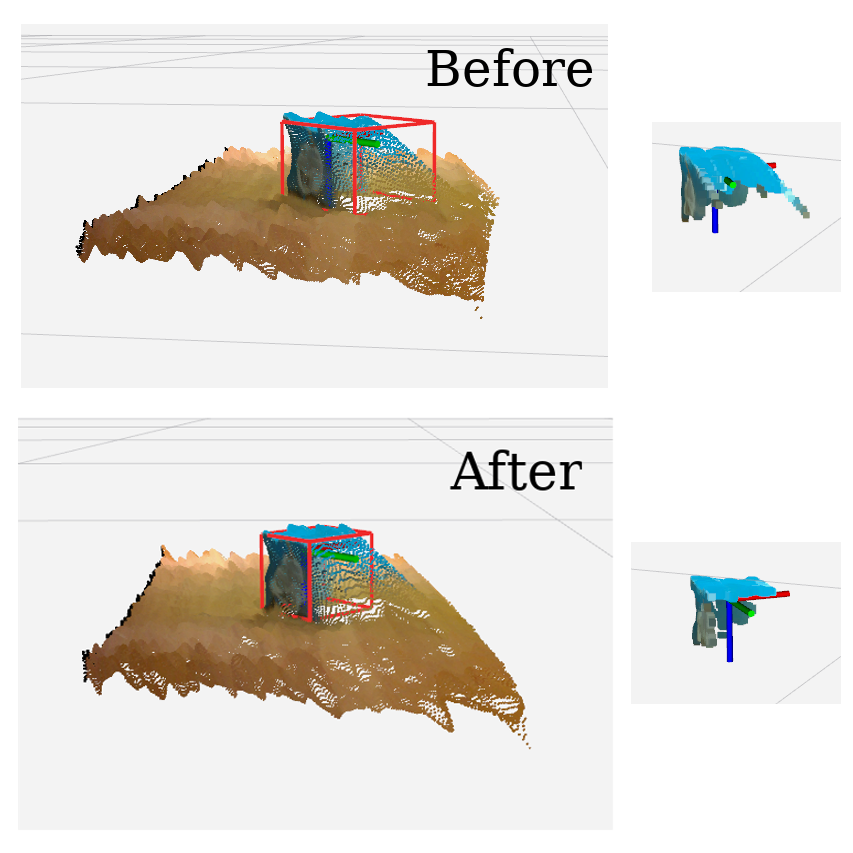
Sample¶
roslaunch jsk_pcl_ros organized_statistical_outlier_removal.launch