FeatureRegistration¶
Align pointcloud using 3d feature. Currently only FPFH is supported.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. The type of point is
pcl::PointNormal.~input/feature(sensor_msgs/PointCloud2)Input feature. The type of point is
pcl::FPFHSignature33.~input/reference/cloud(sensor_msgs/PointCloud2)Reference pointcloud. The type of point is
pcl::PointNormal.~input/reference/feature(sensor_msgs/PointCloud2)Reference feature. The type of point is
pcl::FPFHSignature33.
Publishing Topic¶
~output(geometry_msgs/PoseStamped)Transformation to align reference cloud to input cloud.
~output/cloud(sensor_msgs/PointCloud2)Reference pointCloud which is aligned to input cloud.
Parameters¶
~max_iterations(Integer, default:1000)Maximum number of iterations.
~correspondence_randomness(Integer, default:2)Number of neighbors to use when selecting a random feature correspondence.
A higher value will add more randomness to the feature matching.
~similarity_threshold(Double, default:0.9)Similarity threshold in [0,1] between edge lengths of the underlying polygonal correspondence rejector object, where 1 is a perfect match.
~max_correspondence_distance(Double, default:0.0075)Maximum distance threshold between two correspondent points in source <-> target.
~inlier_fraction(Double, default:0.25)Required inlier fraction of the input in [0, 1]
~transformation_epsilon(Double, default:0.1)Maximum allowable difference between two consecutive transformations in order for an optimization to be considered as having converged to the final solution.
These parameters can be changed by dynamic_reconfigure.
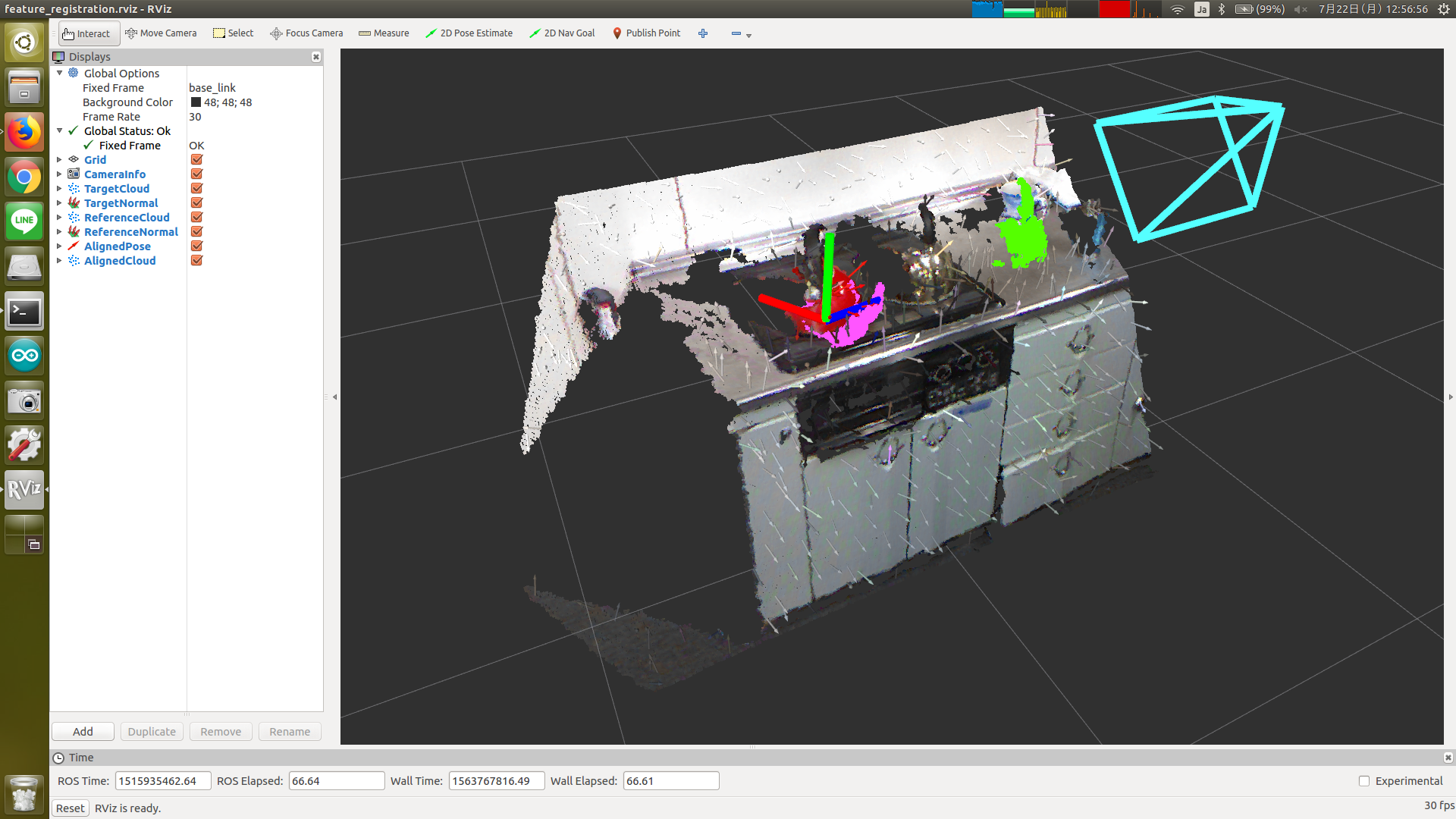
Sample¶
roslaunch jsk_pcl_ros sample_feature_registration.launch