OctreeChangePublisher¶
What Is This¶
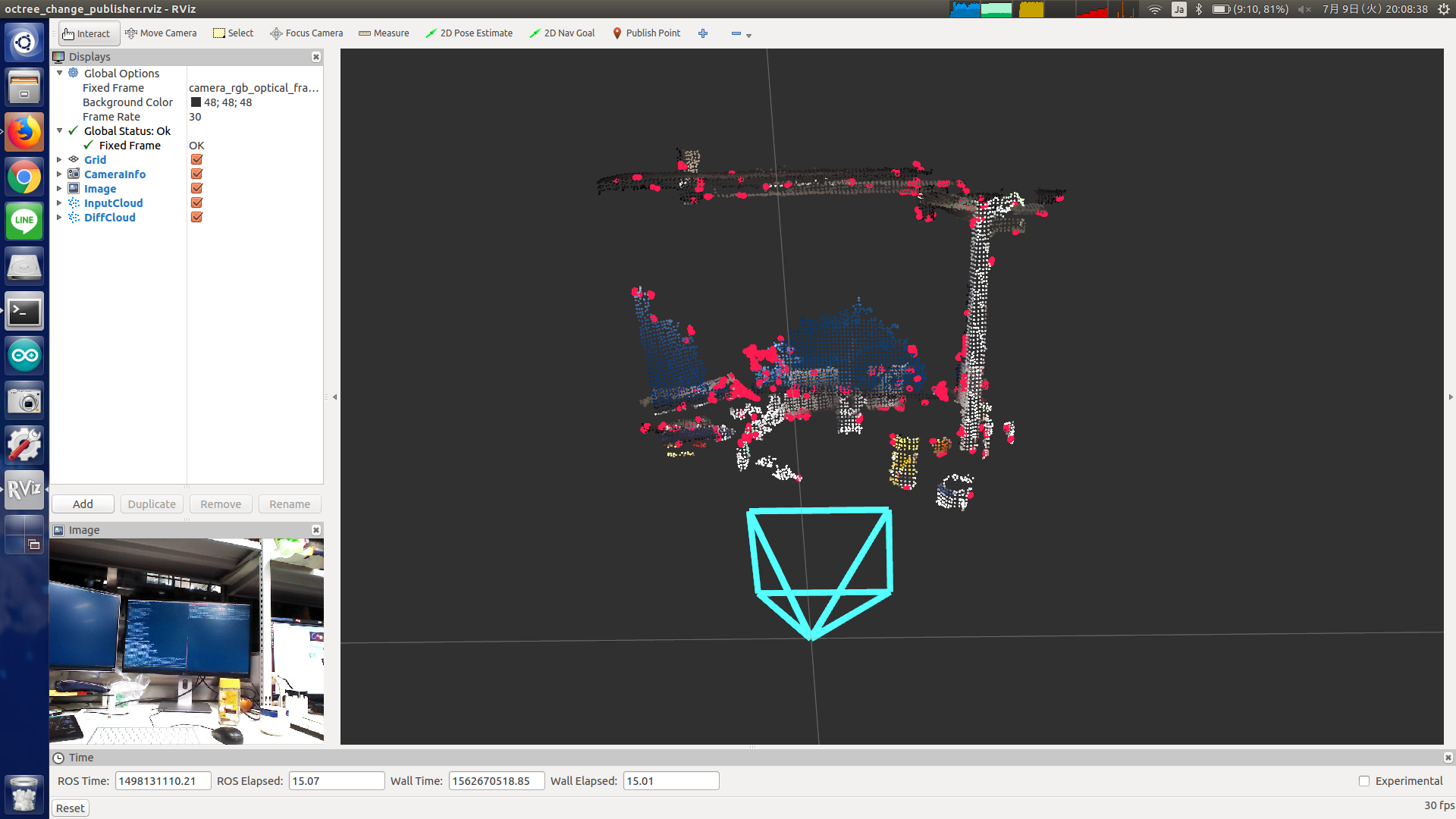
This nodelet will publish the difference of sequential pointcloud. You can get the newly generated pointclouds.
Difference with pcl_ros/SegmentDifference refer
https://github.com/jsk-ros-pkg/jsk_recognition/pull/67
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud.
Publishing Topic¶
~octree_change_result(sensor_msgs/PointCloud2)Point cloud which did not exist in previous time.
Parameters¶
~resolution(Float, default:0.02)Octree resolution at lowest octree level in meters.
~noise_filter(Int, default:2)Minimum amount of points required within leaf node to become serialized.
These parameters can be changed by dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros sample_octree_change_publisher.launch