FuseDepthImages¶
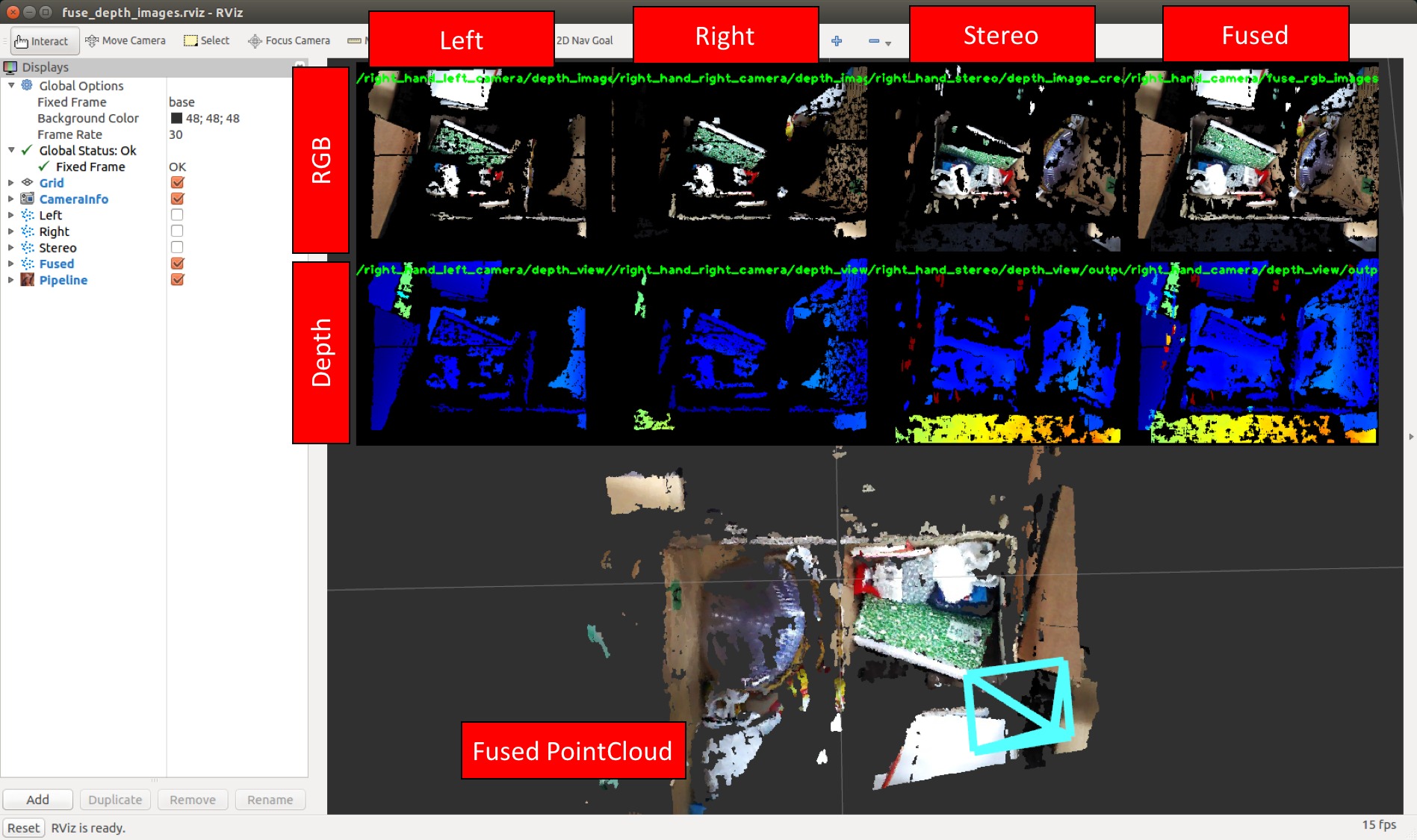
Do sensor fusions by multiple depth images ignoring nan region in each image. For transformation of depth from one to another, you can use jsk_pcl_ros/DepthImageCreator. See sample_fuse_images.launch for detail.
Subscribing Topic¶
See rosparam ~input_topics.
Publishing Topic¶
~output(sensor_msgs/Image)Output fused depth image.
Parameters¶
Required
~input_topics(String array, required)Input depth image topics.
Optional
~approximate_sync(Boolean, default:False):Policy of synchronization, if
Falseit synchronizes exactly, else approximately.~queue_size(Int, default:100):Queue size of topic msgs for synchronization.
~averaging(Bool, default:true)Average image values while sensor fusion.
Sample¶
roslaunch jsk_pcl_ros sample_fuse_images.launch