EdgebasedCubeFinder¶
What Is This¶
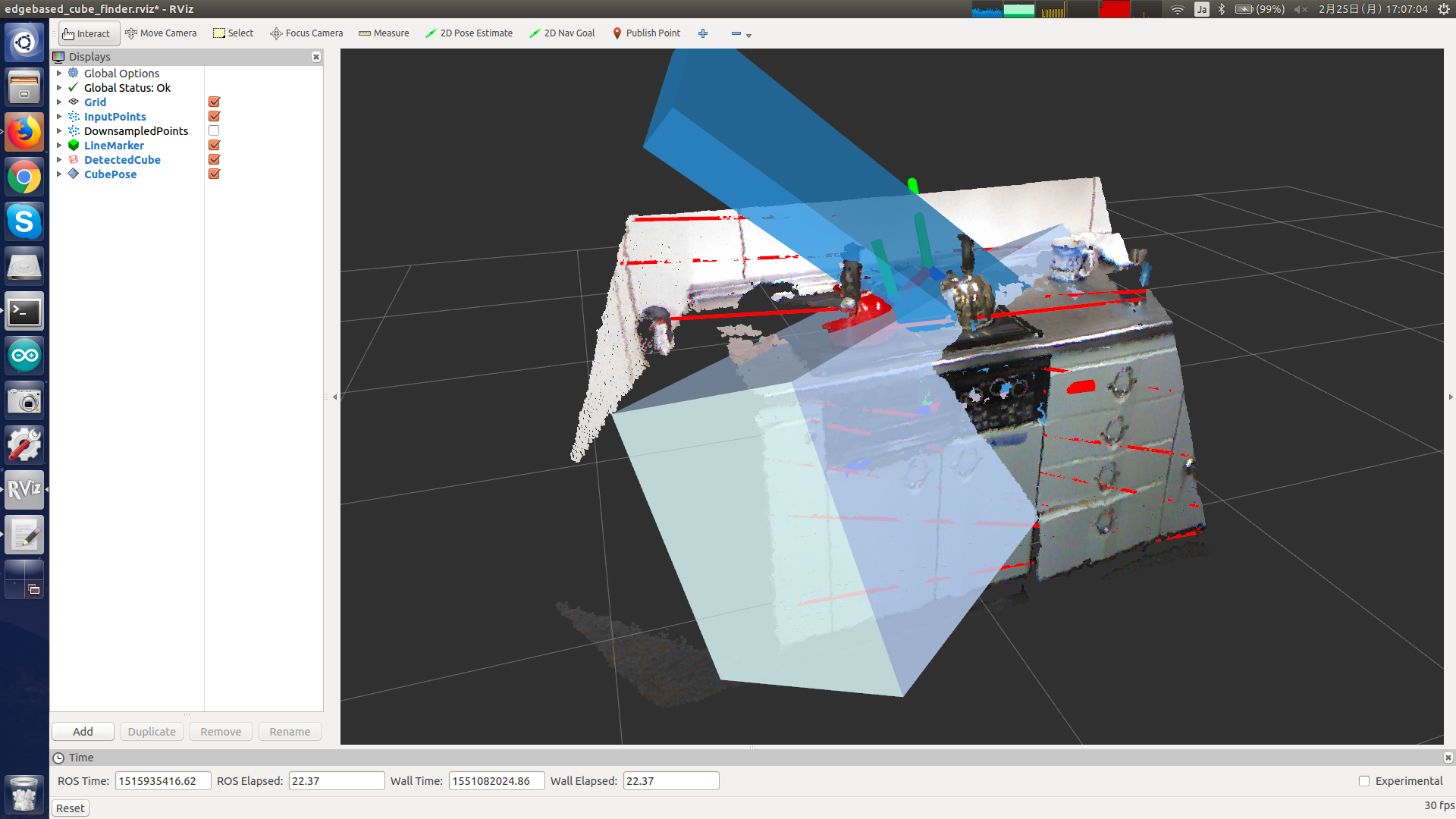
Detect cubes by estimating parallel and perpendicular planes from parallel edge pairs.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud.
~input_edges(jsk_recognition_msgs/ParallelEdgeArray)Input parallel edge pairs.
Publishing Topic¶
~output(jsk_recognition_msgs/BoundingBoxArray)Detected cubes.
~output_pose_array(geometry_msgs/PoseArray)Poses of detected cubes.
~debug_filtered_cloud(sensor_msgs/PointCloud2)Point cloud on edges for debugging.
~debug_clusters(jsk_recognition_msgs/ClusterPointIndices)This topic is advertised, but not published now.
~debug_polygons(jsk_recognition_msgs/PolygonArray)This topic is advertised, but not published now.
~debug_marker(visualization_msgs/Marker)This topic is advertised, but not published now.
Parameter¶
~outlier_threshold(Float, default:0.01)Threshold to remove outliers in meters.
This parameter can be changed by
dynamic_reconfigure.~parallel_edge_distance_min_threshold(Float, default:0.1)Minimum distance between parallel edges in meters.
This parameter can be changed by
dynamic_reconfigure.~parallel_edge_distance_max_threshold(Float, default:0.4)Maximum distance between parallel edges in meters.
This parameter can be changed by
dynamic_reconfigure.~min_inliers(Int, default:1000)This parameter is not used for now.
~convex_area_threshold(Float, default:0.01)This parameter is not used for now.
~convex_edge_threshold(Float, default:0.1)This parameter is not used for now.
Sample¶
roslaunch jsk_pcl_ros sample_edgebased_cube_finder.launch