ICPRegistration¶
 sample_gif
sample_gif
 sample
sample
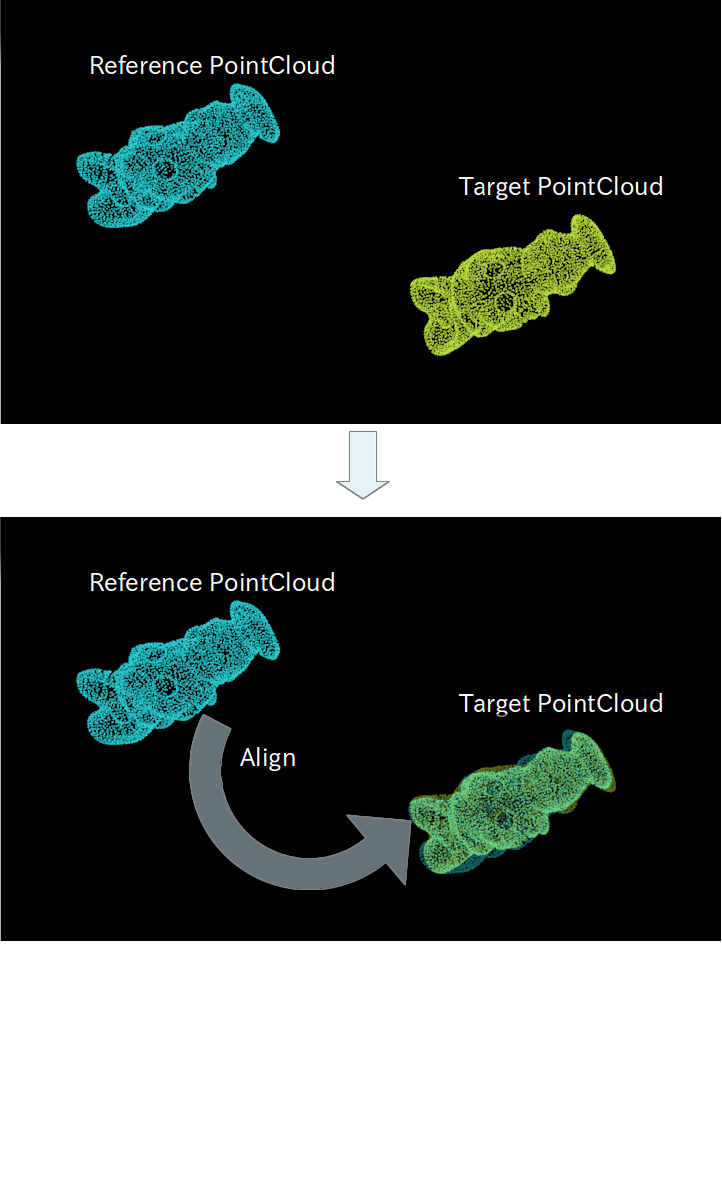
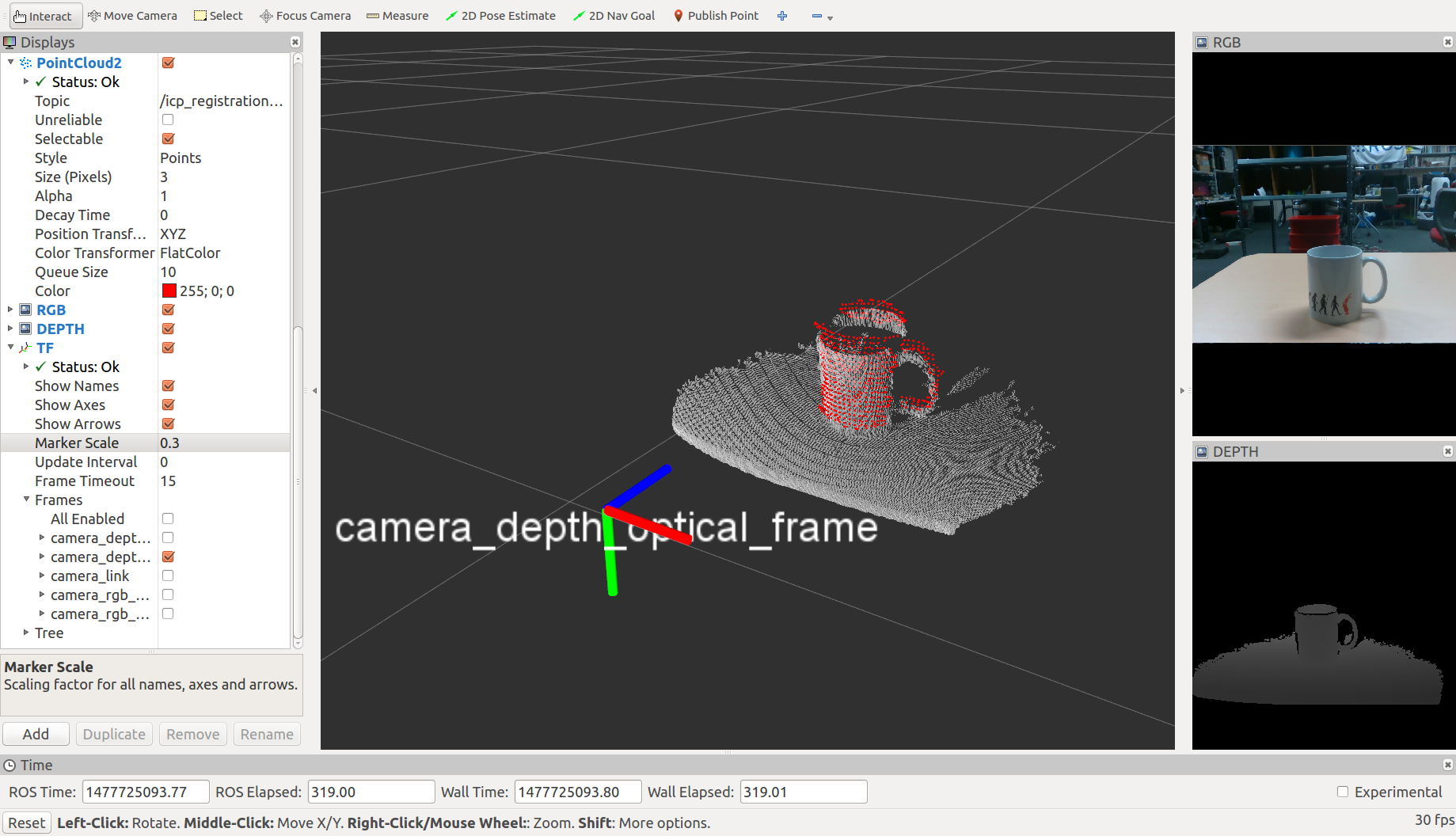
Register two pointclouds based on icp like registration technique.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Target pointcloud.
~input/camera_info(sensor_msgs/CameraInfo)Camera info. This topic is always subscribed but needed only when
~correspondence_algorithm==Projective (1).~input_reference(sensor_msgs/PointCloud2)Reference pointcloud. frame_id of this pointlcoud is ignored.
This topic is subscribed only when
~synchronize_referenceis false. Only one of~input_referenceand~input_reference_arraycan be used.~input_reference_array(jsk_recognition_msgs/PointsArray)Array of reference pointcloud.
ICPRegistrationuses the reference which provides the best fitting score.This topic is subscribed only when
~synchronize_referenceis false. Only one of~input_referenceand~input_reference_arraycan be used.~input_reference_add(sensor_msgs/PointCloud2)Reference pointcloud in addition to
~input_referenceor~input_reference_array.This topic is subscribed only when
~synchronize_referenceis false.~input_box(jsk_recognition_msgs/BoundingBox)Bounding box to align pointcloud with.
This topic is subscribed only when
~synchronize_referenceis false and~align_boxis true.~input_offset(geometry_msgs/PoseStamped)Offset of pose.
It will only be subscribed if
~synchronize_referenceis false and~align_boxis false and~use_offset_poseis true.~reference(sensor_msgs/PointCloud2)Reference pointcloud.
This topic is subscribed only when
~synchronize_referenceis true.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Reference pointcloud aligned with target pointcloud.
~output_pose(geometry_msgs/PoseStamped)Result pose of alignment.
~debug/source(sensor_msgs/PointCloud2)~debug/target(sensor_msgs/PointCloud2)~debug/result(sensor_msgs/PointCloud2)Pointcloud for debugging.
~debug/flipped(sensor_msgs/PointCloud2)This topic is advertised but not published for now.
~icp_result(jsk_recognition_msgs/ICPResult)Result pose of alignment with score and ID of best fitted reference pointcloud.
~output/latest_time(std_msgs/Float32)latest computation time
~output/average_time(std_msgs/Float32)average computation time
Advertising Services¶
~icp_align(jsk_recognition_msgs/ICPAlign)Service API of registration using target and reference pointcloud.
~icp_service(jsk_recognition_msgs/ICPAlignWithBox)Service API of registration using target pointcloud and bounding box.
Reference pointcloud should be stored in advance from
~input_reference,~input_reference_arrayor~input_reference_add.
Parameters¶
Parameters for subscribing topics¶
~synchronize_reference(Bool, default:false)If true,
~inputand~referencewill be subscribed with synchronization.If false, parameter
~align_boxand~use_offset_poseare enabled. Also,~input_reference,~input_reference_arrayand~input_reference_addwill be subscribed separately.~align_box(Bool, default:false)If true,
~inputand~input_boxwill be subscribed with synchronization.~use_offset_pose(Bool, default:false)If
~align_boxis false and~use_offset_poseis true,~inputand~input_offsetwill be subscribed with synchronization.If both of
~align_boxand~use_offset_poseare false,~inputwill be subscribed.
Parameters for ICP alignment¶
~use_normal(Bool, default:false)Use normal information in registration. In order to use this feature, reference and target pointcloud should have valid normal fields.
~transform_3dof(Bool, default:false)Add constraint to transform estimation on 3D (1D rotation + 2D translation) from header frame of input cloud. See
TfTransformCloudto change header frame of point cloud. icp_2d
icp_2d
Parameters below can be changed by dynamic_reconfigure.
~algorithm(Int, default:0)Should be one of
ICP (0),GICP (1)orNDT (2).~correspondence_algorithm(Int, default:0)Should be one of
NN (0)orProjective (1).~max_iteration(Int, default:100)Maximum iterations of ICP alignment.
~correspondence_distance(Float, default:10)Maximum correspondence distance in meters.
~transform_epsilon(Float, default:1e-9)Maximum allowable difference between two consecutive transformations for an optimization to be considered as having converged to the final solution.
~euclidean_fittness_epsilon(Float, default:0.01)Maximum allowed Euclidean error between two consecutive steps in the ICP loop, before the algorithm is considered to have converged.
~ransac_iterations(Int, default:1000)Number of iterations RANSAC should run for.
~ransac_outlier_threshold(Float, default:0.05)Outlier distance threshold for the internal RANSAC outlier rejection loop.
~rotation_epsilon(Float, default:2e-3)Maximum allowable difference between two consecutive rotations for an optimization to be considered as having converged to the final solution.
This parameter is used only when
~algorithmisGICP (1).~correspondence_randomness(Int, default:20)Number of neighbors used when selecting a point neighborhood to compute covariances.
This parameter is used only when
~algorithmisGICP (1).~maximum_optimizer_iterations(Int, default:20)Maximum number of iterations at the optimization step.
This parameter is used only when
~algorithmisGICP (1).~ndt_resolution(Float, default:1.0)~ndt_step_size(Float, default:0.05)~ndt_outlier_ratio(Float, default:0.35)These parameters are not used for now.
Other parameters¶
~use_flipped_initial_pose(Bool, default:true)Whether to consider flipped initial pose.
Sample Launch¶
roslaunch jsk_pcl_ros sample_icp_registration.launch