TiltLaserListener¶
What is this¶
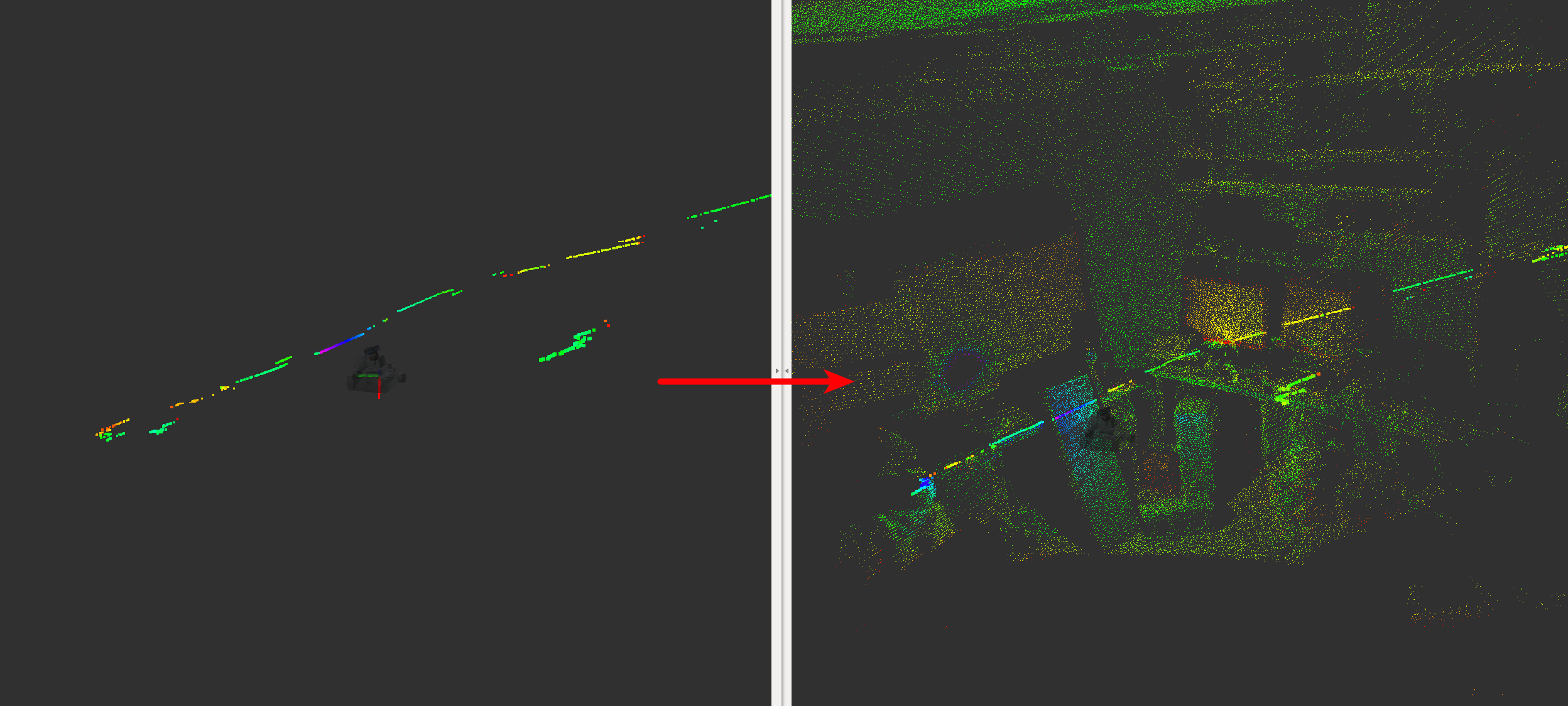
Listen to the joint_states of tilt/spindle laser and publish time range to scane full 3-D space. You can choose several types of tilt/spindle lasers such as tilt-laser of PR2, infinite spindle laser of multisense.
Subscribing Topics¶
~input(sensor_msgs/JointState):Joint angles of laser actuator.
~input/cloud(sensor_msgs/PointCloud2):Input scan pointcloud. It only used if
~not_use_laser_assembler_serviceand~use_laser_assemblerare true.
Publishing Topics¶
~output(jsk_recognition_msgs/TimeRange):Time range to scan 3-D space.
~output_cloud(sensor_msgs/PointCloud2):Assembled pointcloud according to time range of
~output. this require~assemble_scans2service of laser_assembler.This topic is published only when
~use_laser_assembleris true.~output_velocity(geometry_msgs/TwistStamped)Velocity of rotating laser. It is only published when
~twist_frame_idis provided.
Internally Using Services¶
~assemble_scans2(laser_assembler/AssembleScans2):A service to build 3-D pointcloud from laser scan. It should be remapped to
assemble_scans2service of laser_assembler.
Advertising Service¶
~clear_cache(std_srvs/Empty)Clear cache and restart collecting data.
Parameters¶
~max_queue_size(Integer, default:100):Queue size of subscription.
~clear_assembled_scans(Bool, default:false)Do not use assembled scans twice.
~skip_number(Integer, default:1):Skip publishing and calling laser assembler per
~skip_number.~twist_frame_id(String)Frame id used in
~output_velocity.~use_laser_assembler(Boolean, default:False):Enable
~output_cloudand~assemble_scans2.~not_use_laser_assembler_service(Boolean, default:False)When it is true, do not use
~assemble_scans2service but assemble scan pointcloud locally.~joint_name(String, required):Joint name of actuator to rotate laser.
~laser_type(String, default:tilt_half_down):type of rotating laser. You can choose one of the types:
tilt: A mode for tilting laser. In this mode, TiltLaserListener assumes the motor to be moved from minimum joint angle to maximum joint angle over again. TiltLaserListener publishes the minimum and latest time range to move tilting laser from minimum joint angle to maximim joint angle.tilt_half_down: In this mode, TiltLaserListener publishes time range from maximum joint angle to minimum joint angle.tilt_half_up: In this mode, TiltLaserListener publishes time range from minimum joint angle to maximum joint angle liketilt_half_down.infinite_spindle: Infinite spindle laser. TiltLaserListener publishes time range to rotate laser 360 degrees.infinite_spindle_half: Infinite spindle laser, but most of laser has over 180 degrees range of field. Therefore we don’t need to rotate laser 360 degrees to scan 3-D space, just 180 degree rotation is required. In this mode, TiltLaserListener publishes time range a time range of 180 degree rotation.periodic: TiltLaserListener periodically publishes.
~overwrap_angle(Double, default:0.0)overwrap angle offset in radians when detecting time range. Only available when
~laser_typeisinfinite_spindleorinfinite_spindle_half.~publish_rate(Double, default:1.0)rate of publishing assembled cloud [Hz]. Only available when
~laser_typeisperiodic.~vital_rate(Double, default:1.0)Rate of publishing diagnostics [Hz].
Troubleshooting¶
Q:
TiltLaserListenerdoesn’t publish~output_cloudwhen~laser_typeisinfinite_spindleorinfinite_spindle_half.A: Maybe velocity field of
~inputis not valid.
Sample¶
roslaunch jsk_pcl_ros sample_tilt_laser_listener.launch