ContainerOccupancyDetector¶
What Is This¶
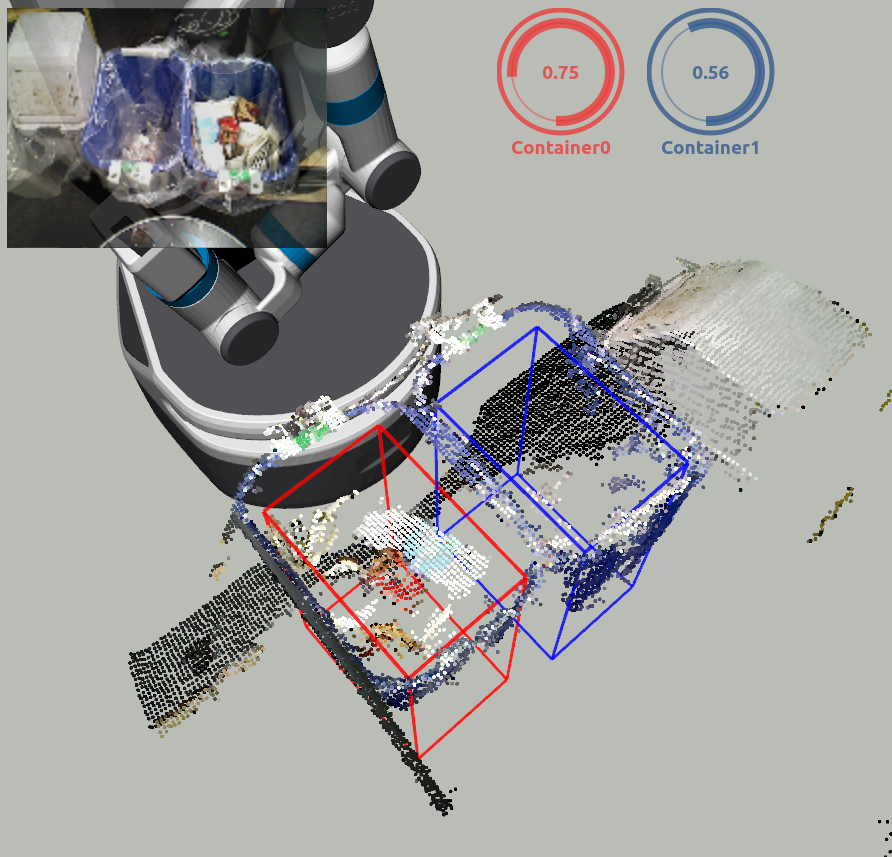
It subscribes containers’ boxes (jsk_recognition_msgs/BoundingBoxArray) and point cloud in the each boxes (sensor_msgs/PointCloud2, jsk_recognition_msgs/ClusterPointIndices) then publish their occupancies (jsk_recognition_msgs/BoundingBoxArray). Their occupancy rates are in each boxes’ value field.
Subscribing Topic¶
~container/boxes(jsk_recognition_msgs/BoundingBoxArray)
Containers input.
~container/points(sensor_msgs/PointCloud2)
Original pointcloud.
~container/point_indices(jsk_recognition_msgs/ClusterPointIndices)
The indices of point cloud in each box.
Publishing Topic¶
~container/occupancies(jsk_recognition_msgs/BoundingBoxArray)
Containers’ occupancies.
Parameters¶
~approximate_sync(Bool, default:false)Approximately synchronize inputs if it’s true.
~queue_size(Int, default:100)How many messages you allow about the subscriber to keep in the queue. This should be big when there is much difference about delay between two topics.
For use¶
It is strongly recommended to use with original launch file like
roslaunch jsk_pcl_ros container_occupancy_detector.launch POINTCLOUD_INPUT:=<your point cloud> CONTAINER_BOXES_INPUT:=<your containers>
Sample¶
roslaunch jsk_pcl_ros sample_container_occupancy_detector.launch