ColorizeMapRandomForest¶
What Is This¶
Extract FPFH (Fast Point Feature Histograms) from input point cloud, and classify each cluster into 2 categories using Random Forest classifier.
This node internally applies x, y and z filter as preprocessing.
In contrast to jsk_pcl_ros/ColorizeRandomForest, this node does not run euclidean clustering as preprocessing.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud from which specified part will be extracted.
Publishing Topic¶
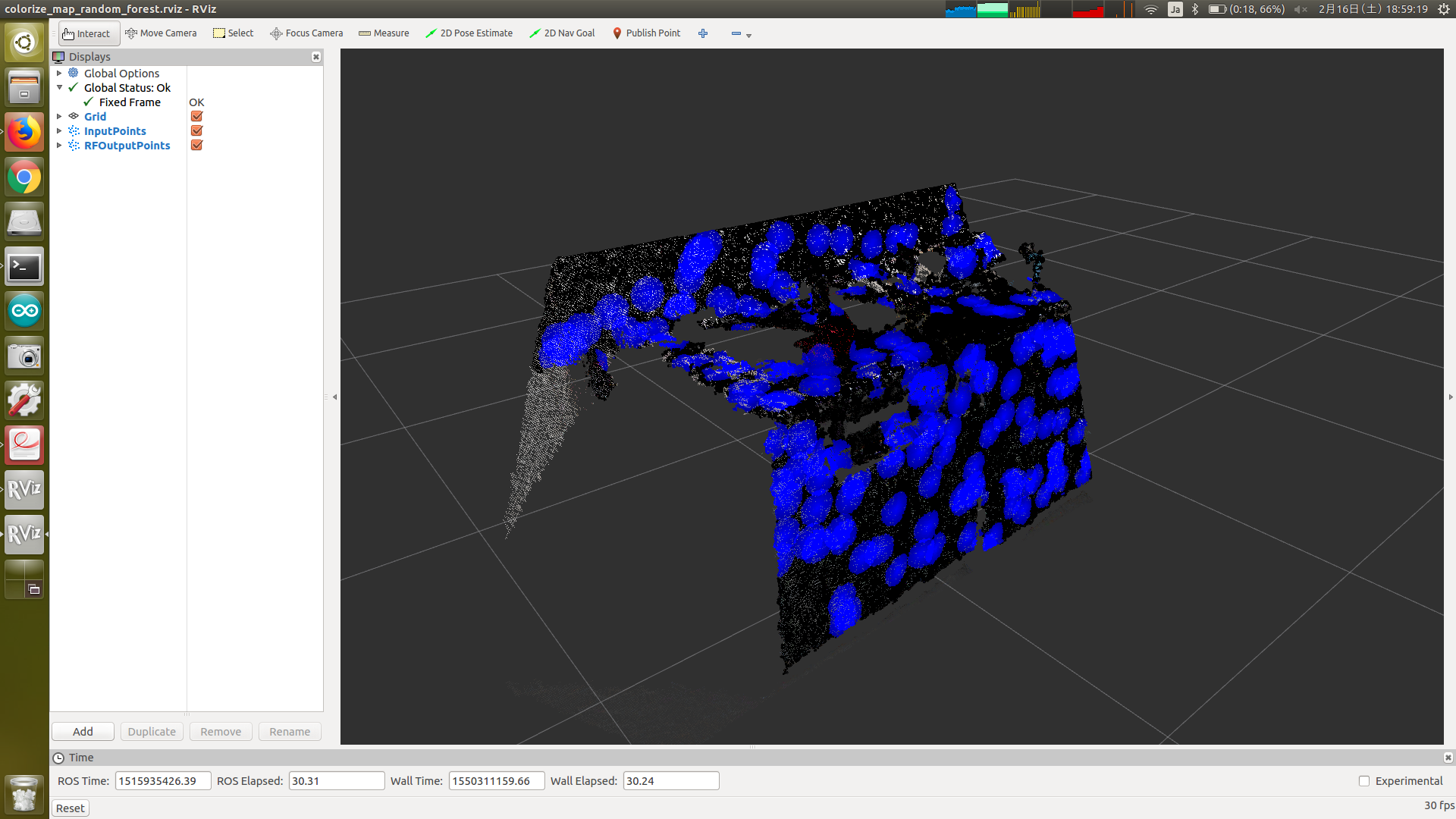
~output/debug_points(sensor_msgs/PointCloud2)Output point cloud for debugging. Red means classification result == 0, blue means the other.
Parameter¶
~rs(Float, default:0.03)Radius in meters used for searching FPFH.
~po(Float, default:0.03)Offset in meters used for pass through filter.
~po2(Float, default:0.06)Another offset in meters used for pass through filter.
~sum_num(Int, default:100)Number of points used for averaging FPFH histogram.
Calling Service¶
~classify_server(ml_classifiers/ClassifyData)Random Forest server for classification.
Sample¶
roslaunch jsk_pcl_ros sample_colorize_map_random_forest.launch