OrganizedPassThrough¶
What Is This?¶
Filter organized pointcloud based on specified index range.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)
Organized point cloud.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)
Filtered point cloud.
Parameter¶
~min_index(Int, default:0)Minimum index along
~filter_fieldaxis that are included.~max_index(Int, default:640)Maximum index along
~filter_fieldaxis that are included.~keep_organized(Boolean, default:true)Set keep_organized when extract indices.
~remove_nan(Boolean, default:false)Remove points with x, y, or z equal to NaN.
~filter_limit_negative(Boolean, default:false)Set negative when convert indices to point cloud.
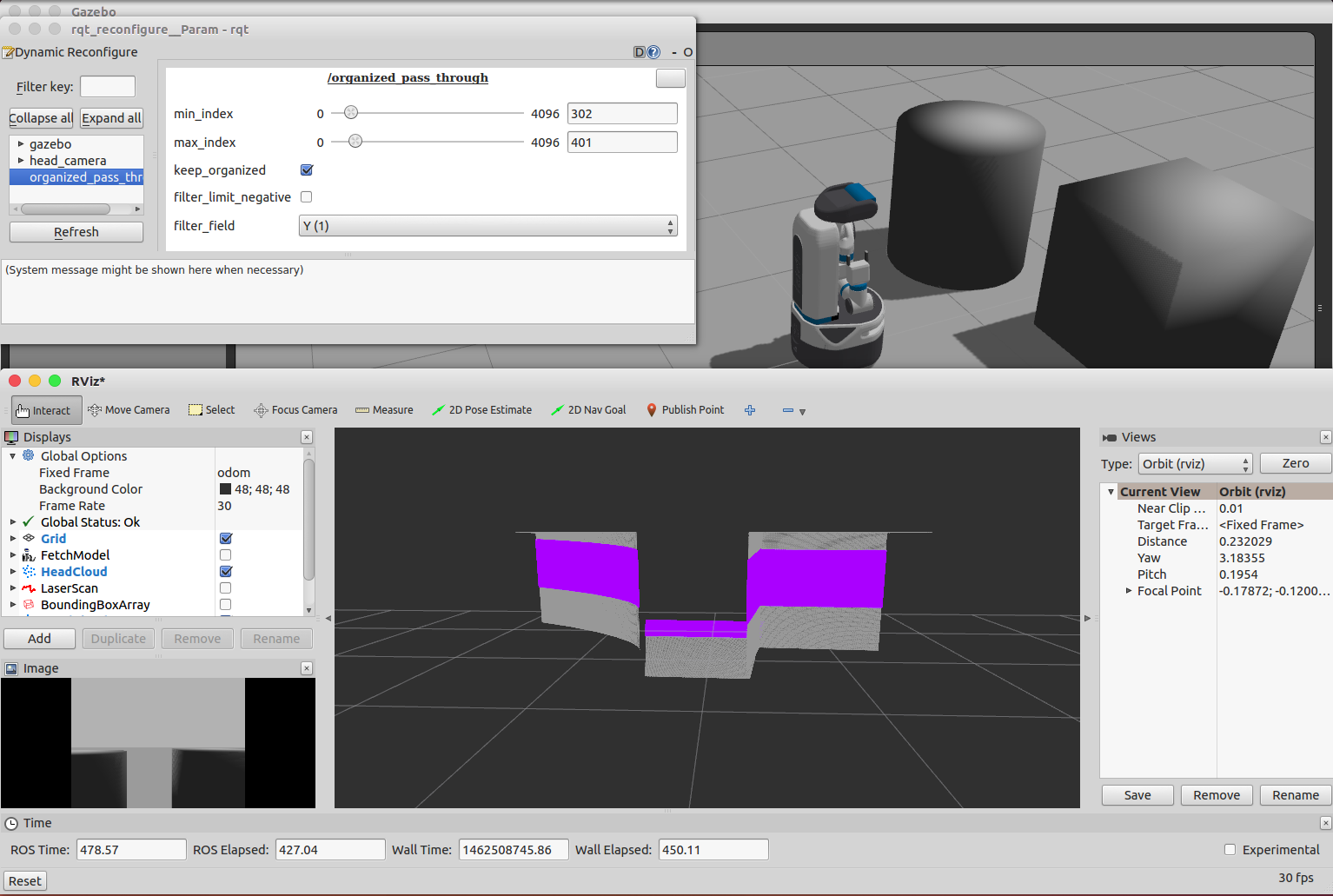
~filter_field(Int, default:0)0: Filter based on x field.1: Filter based on y field.
These parameters can be changed by dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros sample_organized_pass_through.launch