IntermittentImageAnnotator¶
What Is This¶
Store images when
~shutterservice is calledPublish snapshots as one concatenated image
Subscribe
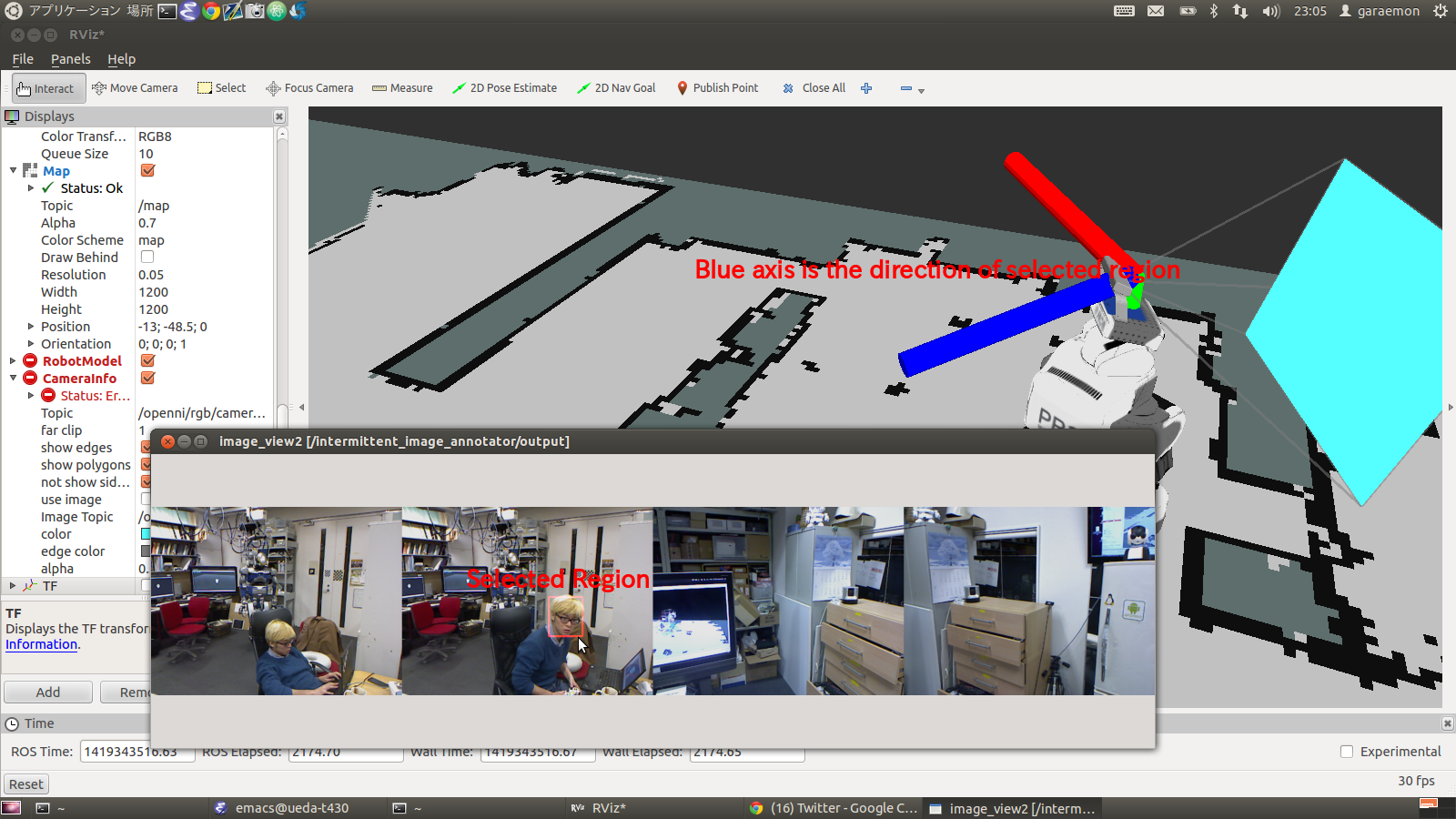
~output/screenrectangleto get ROI.Publish ROI information to
~outputnamespace.Publish pointcloud inside of the ROI to
~output/cloudif~store_pointcloudis set
Subscribing Topic¶
~input/imageand~input/camera_info(sensor_msgs/Imageandsensor_msgs/CameraInfo)Input image and camera info.
~input/cloud(sensor_msgs/PointCloud2)Input pointcloud to be clipped by specified ROI.
~output/screenrectangle(geometry_msgs/PolygonStamped)ROI. We expect to use image_view2.
Publishing Topic¶
~output(sensor_msgs/Image)Snapshots as one concatenated image.
~output/direction(geometry_msgs/PoseStamped)Direction of ROI as
PoseStamped. z-axis directs the center of ROI.~output/roi(jsk_recognition_msgs/PosedCameraInfo)Publish ROI of specified region as
PosedCameraInfo.~output/cloud(sensor_msgs/PointCloud2)Pointcloud inside of ROI. pointcloud is stored when
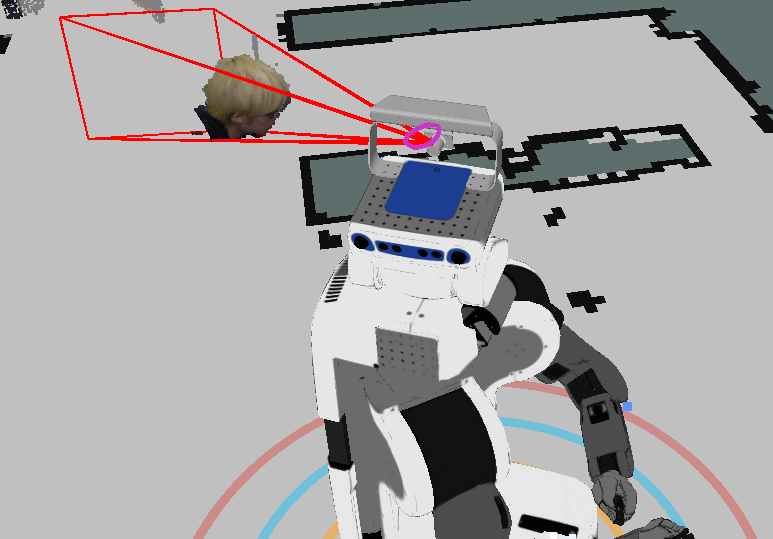
~shutterservice is called and its timestamp will be updated according to the latest image.~output/marker(visualization_msgs/Marker)Marker to visualize ROI (
~output/roi).
Parameters¶
~fixed_frame_id(String, default:odom)Fixed frame id to resolve tf.
~max_image_buffer(Integer, default:5)The maximum number of images to store in this nodelet.
~rate(Float, default:1.0)Publishing rate of concatenated images in [Hz].
~store_pointcloud(Boolean, default:false)Store pointcloud if it’s true
~keep_organized(Boolean, default:false)Keep pointcloud organized after clipping by specified ROI.
Advertising Service¶
~shutter(std_srvs/Empty)Take a snapshot
~clear(std_srvs/Empty)Clear images stored in the nodelet.
~request(std_srvs/Empty)Request publishing concatenated image to
~output.
Sample¶
roslaunch jsk_pcl_ros sample_intermittent_image_annotator.launch