SelectedClusterPublisher¶
What Is This¶
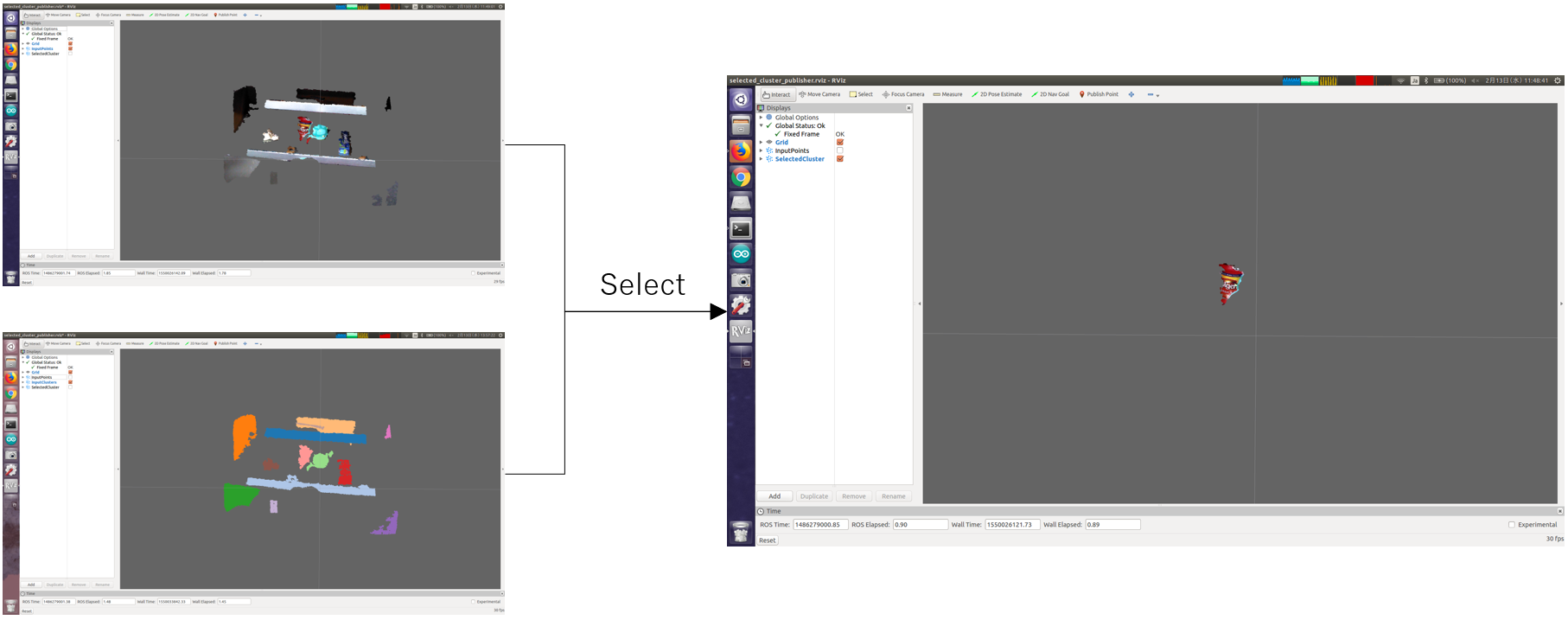
Extract specified point cloud from input point cloud and clusters.
This feature provides functionality which is similar to the combination of jsk_pcl_ros_utils/ClusterPointIndicesToPointIndices + jsk_pcl_ros/ExtractIndices.
The former (this node) subscribes a topic for specifying index, and the latter gets paramater.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud from which specified part will be extracted.
~indices(jsk_recognition_msgs/ClusterPointIndices)Input cluster indices.
~selected_index(jsk_recognition_msgs/Int32Stamped)Index of cluster indices used for extraction.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Selected part of input point cloud.
Parameter¶
~keep_organized(Bool, default:False)Whether to keep organized for output point cloud.
Sample¶
roslaunch jsk_pcl_ros sample_selected_cluster_publisher.launch