DetectGraspablePosesPcabase¶
What Is This¶
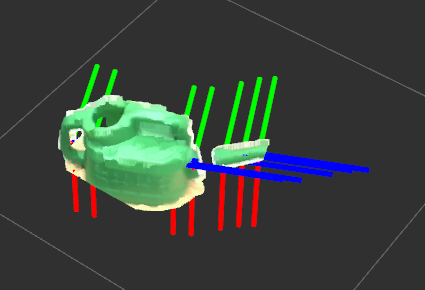
Detect_graspable_poses_pcabase.py is a program which publishes pose array where a robot can grasp, using point cloud of a target object and PCA algorithm. In the above image, the grasp poses are visualized with the axies. Please transform input cloud to a flame which direction is the same as the robot (e.g. /BODY) before using this program.
The above image illustrates an example way to use this node. Axies represent poses where the robot can grasp.
Example videos using a real robot (only allowed for the jsk members)¶
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. RGB field is required.
Publishing Topic¶
~output/can_grasp_poses(geometry_msgs/PoseArray)PoseArray where a robot can grasp.
Parameters¶
~direction(Character, default:x)From which direction a robot try to grasp a target object. (’x’: from the front, ‘z’: from the top)
~hand_width[m](Float, default:0.13)How long a robot can spread its hand.
~interval_m[m](Float, default:0.04)Interval between target poses. Please decrease this number if you want to detect more possible grasp poses.