publish_clicked_point_bbox.py¶
What Is This¶
This node subscribes geometry_msgs/PointStamped message and publishes
jsk_recognition_msgs/BoundingBoxArray at that point.
Subscribing Topic¶
clicked_point(geometry_msgs/PointStamped)Input point whose position is used for bounding box.
Publishing Topic¶
bbox_with_clicked_point(jsk_recognition_msgs/BoundingBoxArray)Output bounding box array.
Dimensions of the box is set to
1 [m]and frame ID is set toodom.So the transformation between
clicked_point/header/frame_idandodomshould be resolvable.
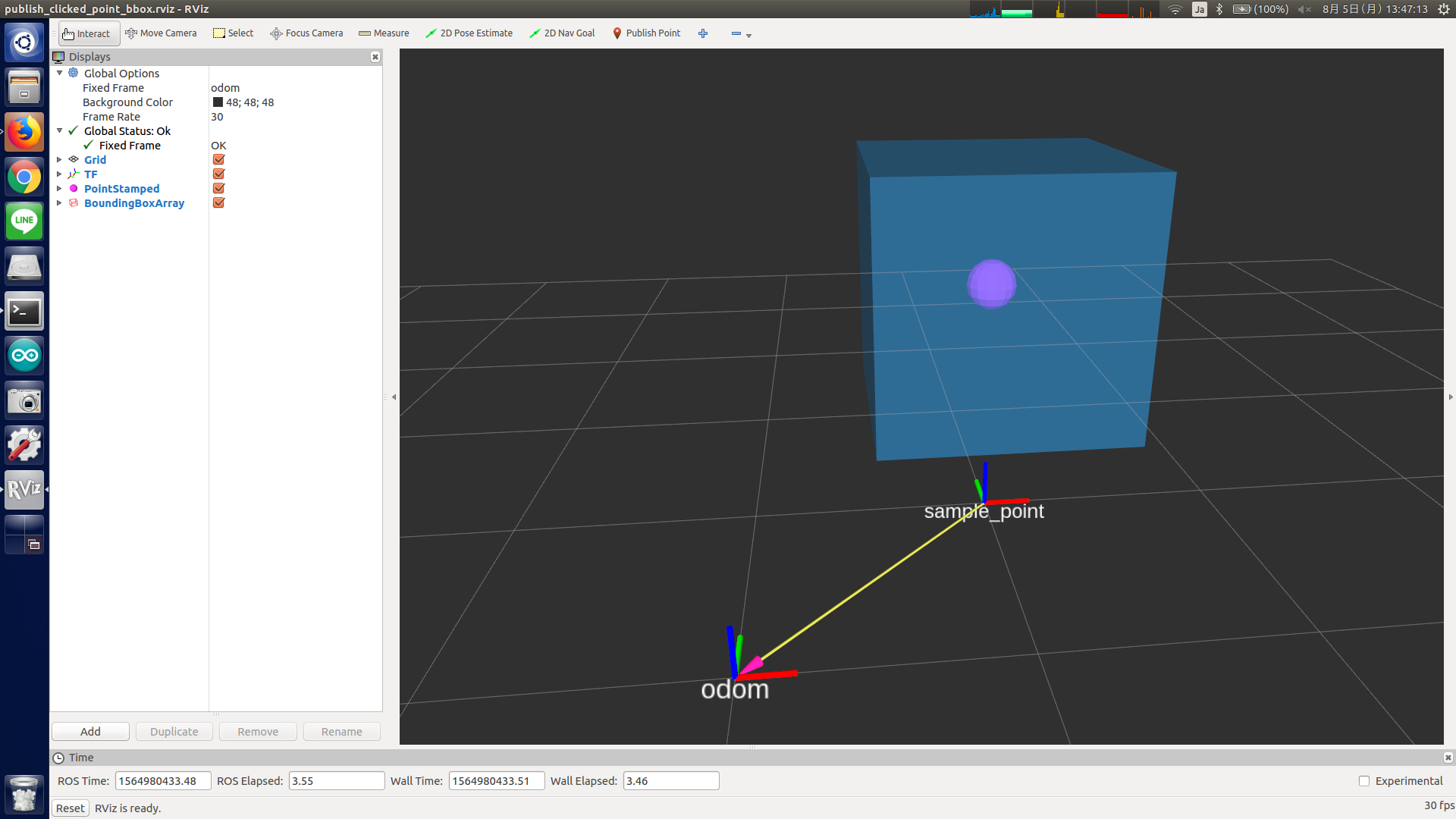
Sample¶
roslaunch jsk_pcl_ros sample_publish_clicked_point_bbox.launch