ROIClipper¶
What Is This¶
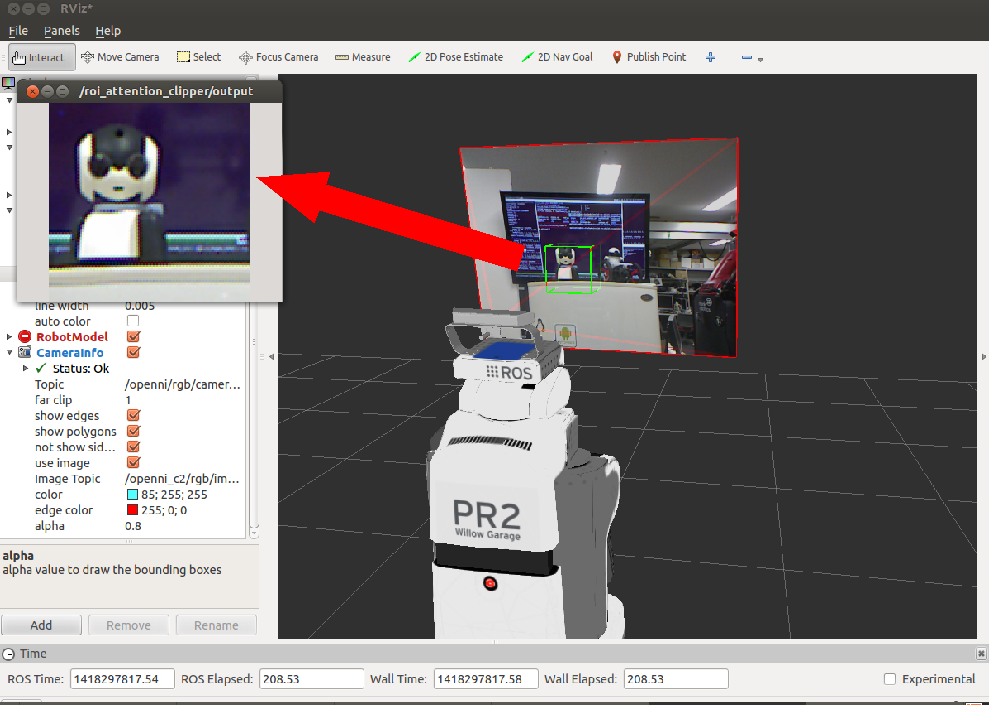

It retrieves sensor_msgs/Image and sensor_msgs/CameraInfo and publish sensor_msgs/Image of ROI.
It is similar to image_proc/crop_decimate but you can use CameraInfo/roi field to specify ROI.
We expect to use jsk_pcl/ROIClipper with
jsk_pcl/AttentionClipper to get ROI image.
Subscribing Topic¶
~input/image(sensor_msgs/Image)Input image.
~input/camera_info(sensor_msgs/CameraInfo)Camera parameter and ROI field should be filled.
~input/imageand~input/camera_infoshould be synchronized if~not_syncis false.~input/cloud(sensor_msgs/PointCloud2)Input point cloud ROI will be applied to.
This topic is only enabled if
~not_syncis true.
Publishing Topic¶
~output(sensor_msgs/Image)Image of ROI.
~output/cloud_indices(pcl_msgs/PointIndices)The indices of the pointcloud which is inside of the interest 3-D region.
~output/cloud(sensor_msgs/PointCloud2)PointCloud clipped from
~input/cloudand~input/camera_info.
Parameter¶
~not_sync(Bool, default:False)If
~not_syncis true, do not need to synchronize camera info and other input topics, and pointcloud clipping is enabled.~keep_organized(Bool, default:False)Whether to keep output point cloud organized or not.
Sample¶
roslaunch jsk_pcl_ros sample_roi_clipper.launch