IncrementalModelRegistration¶
What Is This¶
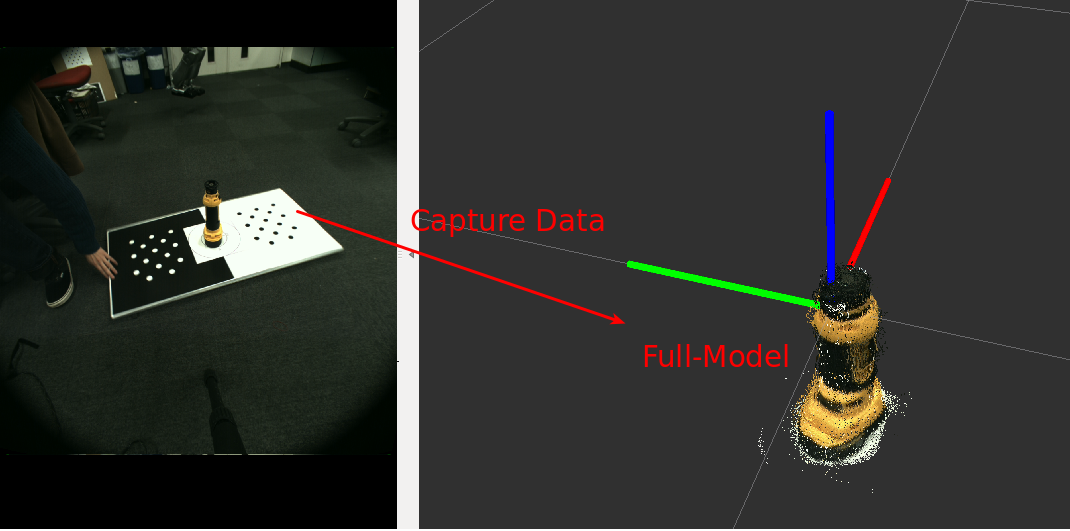
Build a full-model from sequential captured data.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. RGB field is required.
~input/pose(geometry_msgs/PoseStamped)Initial pose to estimate acculate pose of the pointcloud.
~input/indices(pcl_msgs/PointIndices)Indices to mask object in
~inputpointcloud.
Publishing Topic¶
~output/non_registered(sensor_msgs/PointCloud2)Pointcloud just concatenated according to
~input/pose~output/registered(sensor_msgs/PointCloud2)Pointcloud refined by ICP.
Internally Using Services¶
~icp_service(jsk_recognition_msgs/ICPAlign)ICP service interface to refine model.
Advertising Services¶
~start_registration(std_srvs/Empty)Trigger to start registration.
Parameters¶
~frame_id(String, default:multisense/left_camera_optical_frame)Frame ID used for output topics.
Sample¶
roslaunch jsk_pcl_ros sample_incremental_model_registration.launch