pointcloud_screenpoint.l¶
What Is This¶
This node is a service client of PointcloudScreenPoint.
Subscribing Topic¶
$(param ~sensor_topic)/screenpoint(geometry_msgs/PointStamped)Screen point from
image_view2.
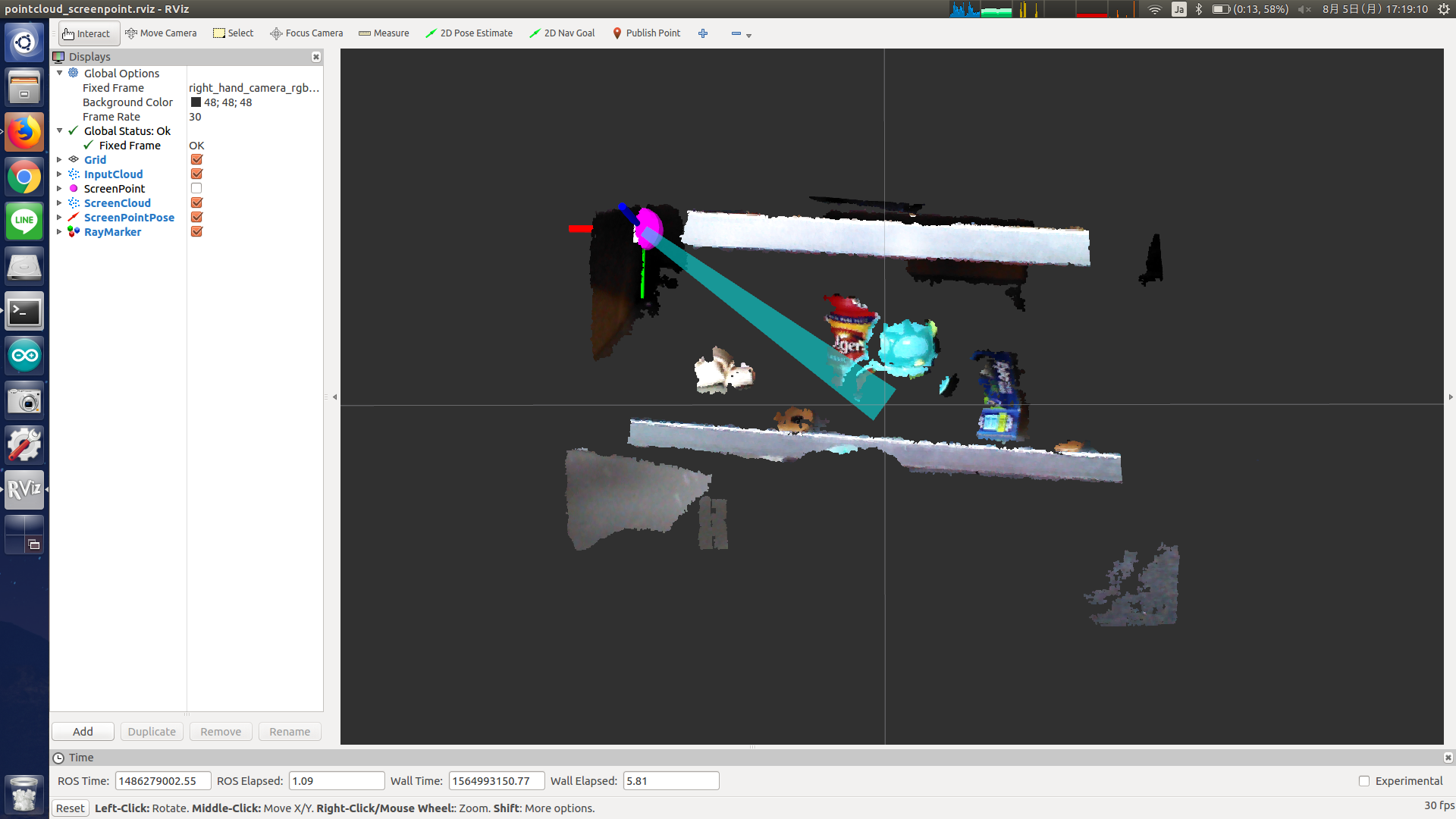
Publishing Topic¶
ray_marker_array(visualization_msgs/MarkerArray)Marker of touched point which can be visualized in
rviz.image_marker(image_view2/ImageMarker2)Marker of touched point which can be visualized in
image_view2.ray_coords(geometry_msgs/PoseStamped)Pose of 3D touched point.
Internally Calling Service¶
$(param ~ray_srv)(jsk_recognition_msgs/TransformScreenpoint)Service server.
Parameter¶
~sensor_topic(String, required)Name space of subscribed topic.
See
Subscribing Topic.~ray_srv(String, required)Name of service server.
See
Internally Calling Service.~base_frame(String, default:base_footprint)Frame ID of
ray_coords.
Sample¶
roslaunch jsk_pcl_ros sample_pointcloud_screenpoint.launch