LineSegmentDetector¶
What is this?¶
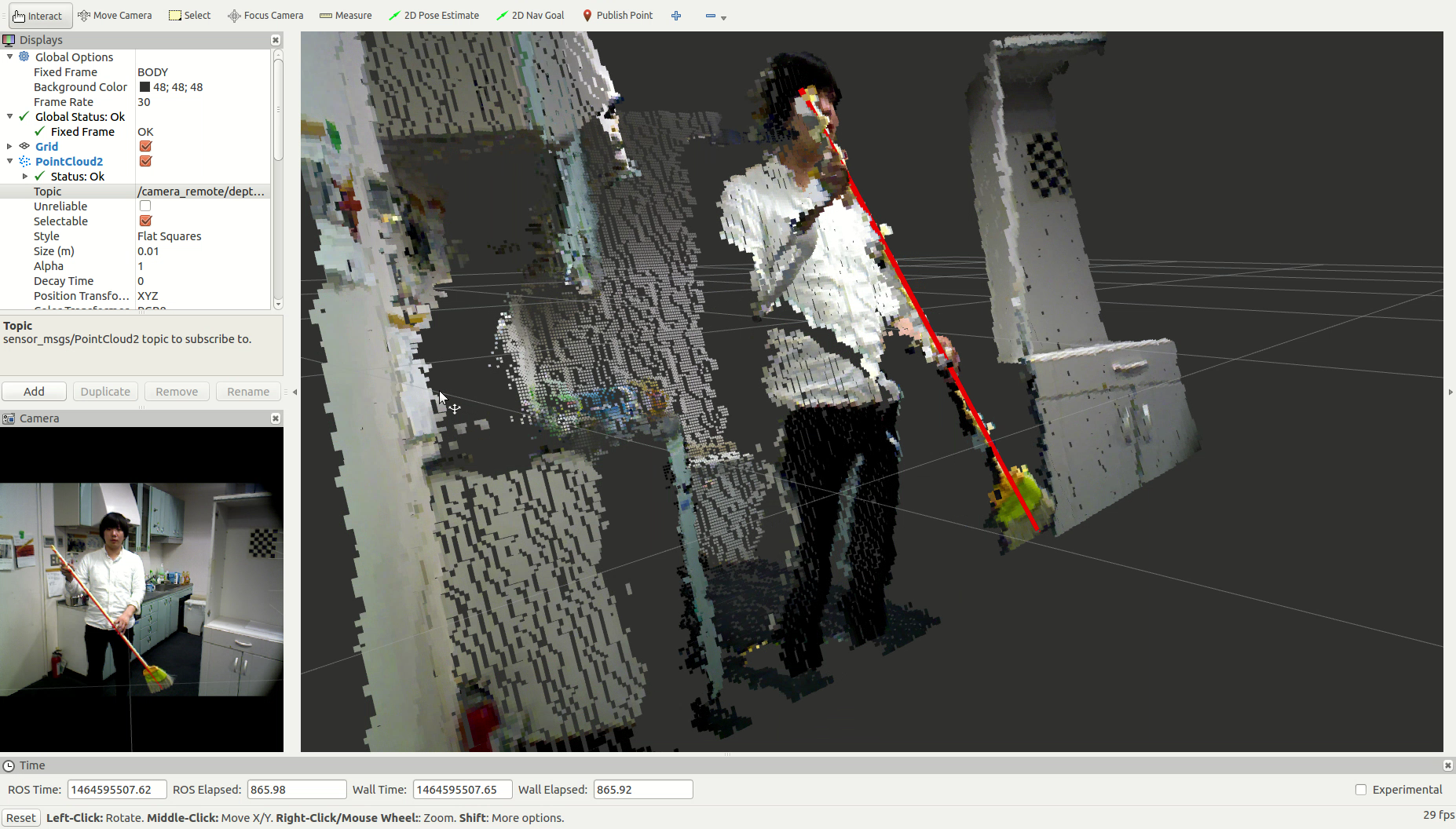
Detect lines in a point cloud.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input point cloud.
~input_indices(jsk_recognition_msgs/ClusterPointIndices)Input indices of the cluster in a point cloud.
Publishing Topics¶
~debug/line_marker(visualization_msgs/Marker)Marker topic to visualize detected line.
~output/inliers(jsk_recognition_msgs/ClusterPointIndices)~output/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Result of detection.
Parameters¶
~approximate_sync(Bool, default:false)Whether to allow approximate synchronization of input topics.
~method_type(Int, default:0)The type of sample consensus method to use.
0: SAC_RANSAC
1: SAC_LMEDS
2: SAC_MSAC
3: SAC_RRANSAC
4: SAC_RMSAC
5: SAC_MLESAC
6: SAC_PROSAC
~outlier_threshold(Double, default:0.005)Outlier threshold in meters to detect plane using RANSAC.
~max_iterations(Int, default:1000)Maximum iteration number to detect larger plane using RANSAC.
~min_indices(Int, default:1000)Minimum number of points which construct a line.
~min_length(Double, default:0.1)Minimum length of each line in meters.
~line_width(Double, default:0.01)Width of line marker published to
~debug/line_marker.
Sample¶
roslaunch jsk_pcl_ros sample_line_segment_detector.launch