HandleEstimator¶
What Is This¶
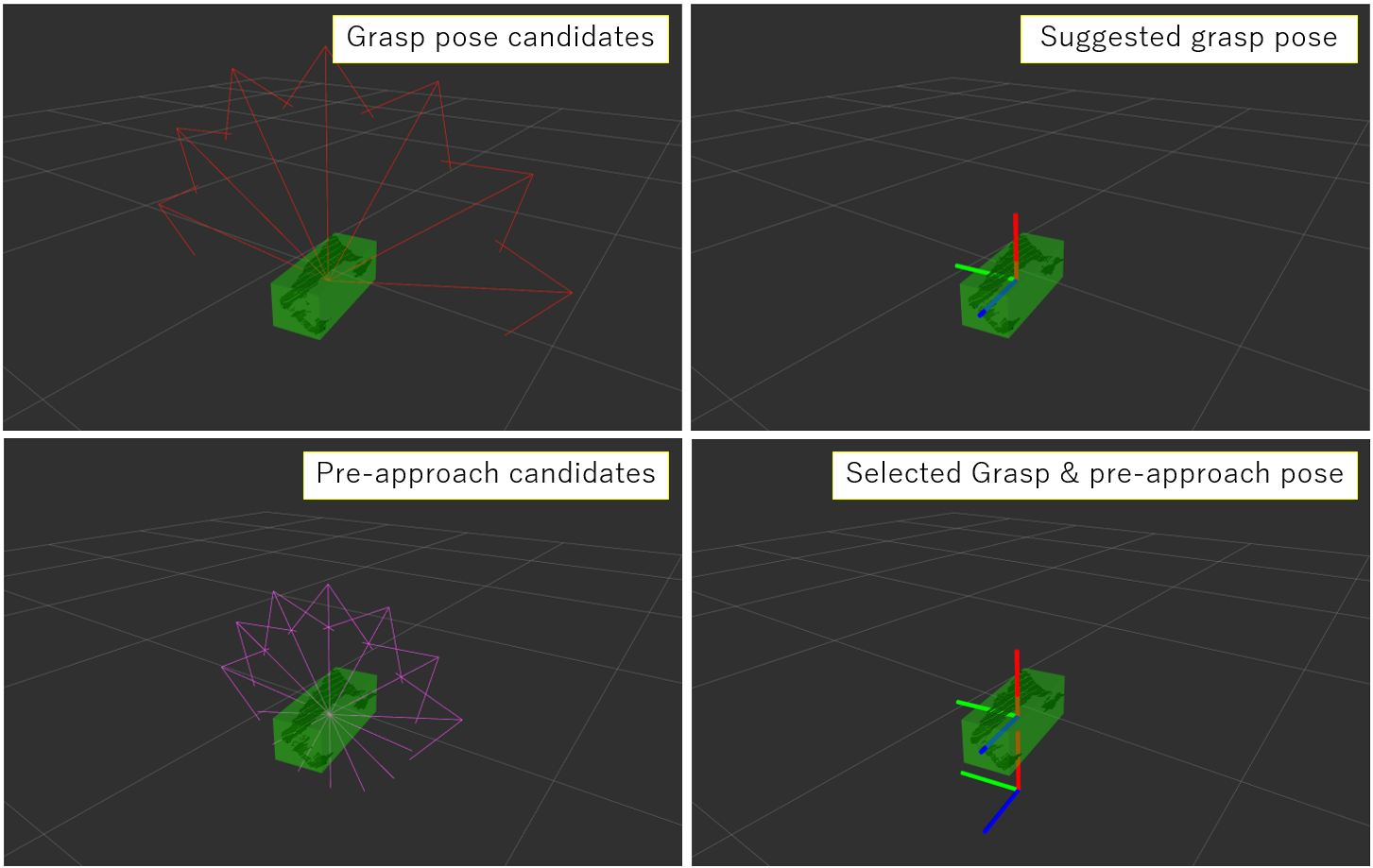
Estimate 6-DOF grasp pose candidates using bounding box.
This node is similar to jsk_pcl_ros/detect_graspable_poses_pcabase.py, but the differences are …
Publish pre-approach pose or not.
Candidates are the same position but different pose (former), or different position but the same pose (latter).
This node can also publish only selected pose.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud.
Currently this topic is not used for estimation, but required.
It must be synchronized with
~input_box.~input_box(jsk_recognition_msgs/BoundingBox)Input bounding box.
Dimensions of bounding box are used to estimate handle type internally.
So it is recommended that the box is aligned to the object using PCA or so.
~selected_index(jsk_recognition_msgs/Int32Stamped)Pose index chosen from indices of
~outputand~output_preapproach.
Publishing Topic¶
~output(geometry_msgs/PoseArray)Grasp pose candidates.
~output_preapproach(geometry_msgs/PoseArray)Pre-approach poses of
~output.~output_best(geometry_msgs/PoseStamped)Suggested best grasp pose chosen from
~output.~output_selected(geometry_msgs/PoseStamped)Grasp pose selected by
~selected_index.~output_selected_preapproach(geometry_msgs/PoseStamped)Pre-approach poses of
~output_selected_preapproach.
Parameter¶
~gripper_size(Float, default:0.08)Gripper width of robot in meters.
If all dimensions of input box are greater than this parameter, then the box will be estimated as ungraspable.
~approach_offset(Float, default:0.1)Offset from grasp point in meters.
This parameter is used for calculating
~output_preapproach.~angle_divide_num(Int, default:6)Number of grasp pose candidates.
Sample¶
roslaunch jsk_pcl_ros sample_handle_estimator.launch