ResizePointsPublisher¶
What is this¶
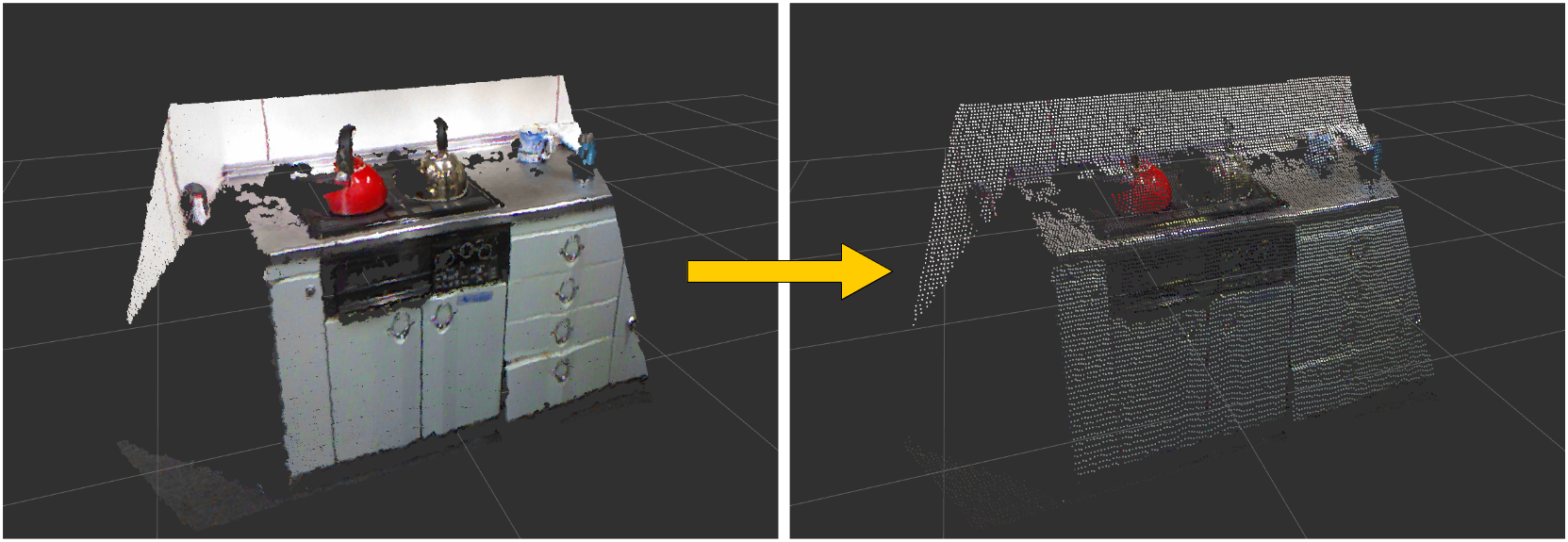
ResizePointsPublisher resizes PointCloud generated from depth images.
It keeps organized pointcloud. For example you can create QVGA pointcloud from VGA pointcloud of kinect like sensors.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):Input PointCloud. The input should be organized pointcloud.
~input/mask(sensor_msgs/Image):Mask image used for automatically updating
~step_xand~step_y.~indices(pcl_msgs/PointIndices):Points of only these indices will be extracted and resized.
To subscribe this topic,
~use_indicesmust be set to true.
Publishing Topics.¶
~output(sensor_msgs/PointCloud2):Output PointCloud. The output will be organized.
Parameters¶
~step_x,~step_y(Double, default:2):Binning step when resizing pointcloud.
These parameters can be changed by
dynamic_reconfigure.~use_indices(Boolean, default:false):If true,
~indicesis subscribed.~not_use_rgb(Boolean, default:false):If you want to resize pointcloud without RGB fields, you need to set this parameter to True.
Sample¶
roslaunch jsk_pcl_ros sample_resize_points_publisher.launch