BorderEstimator¶
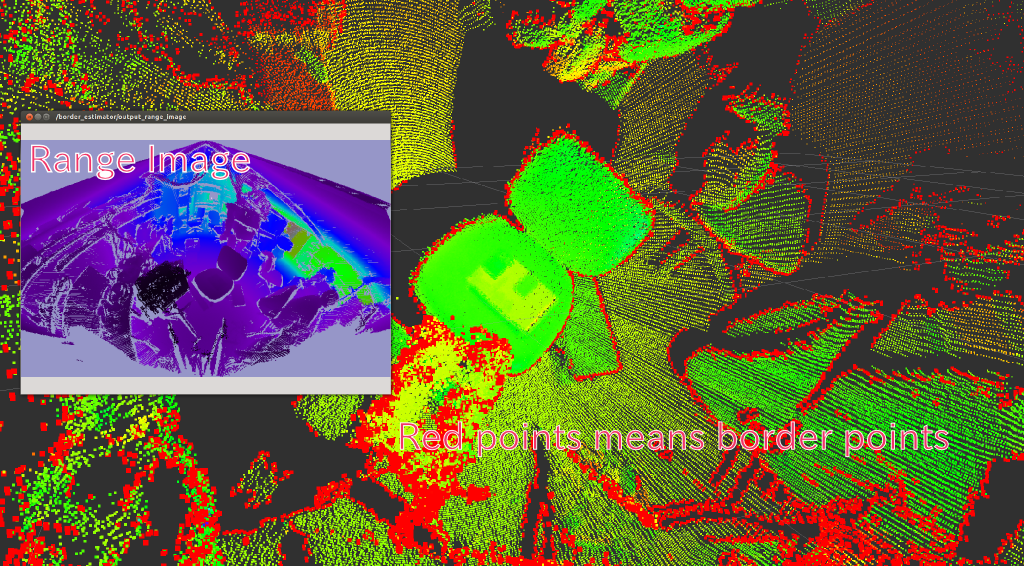
Convert pointcloud into range image and detect border
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud
~input_camera_info(sensor_msgs/CameraInfo)Camera info is used to reconstruct organized range image when
~model_typeisplanar
Publishing Topic¶
~output_cloud(sensor_msgs/PointCloud)Pointcloud converted as range image. If
~model_typeisplanar, it should be equal to original organized pointcloud, When~model_typeislaser, original pointcloud and~output_cloudis not same.~output_border_indices(pcl_msgs/PointIndices)Indices of border
~output_veil_indices(pcl_msgs/PointIndices)Indices of veil points
~output_shadow_indices(pcl_msgs/PointIndices)Indices of shadow edge
ourput_range_image(sensor_msgs/Image)Range image
Parameters¶
~model_type(String, default:planar)Choose model type of range image by this topic.
planar,laserorsphereis allowed.~angular_resolution(Double, default:0.5)Angular resolution of range image. Only does
lasermodel use this parameter.~noise_level(Double, default:0.1)Noise level of pointcloud. Only does
lasermodel use this parameter.~min_range(Double, default:0.0)Minimam distance to take into account range image. Only does
lasermodel use this parameter.~border_size(Integer, default:0)Border size to remove from range image.
~max_angle_height(Double, default:2pi)Maximum angle height of range image. Only does
lasermodel use this parameter.~max_angle_width(Double, default:2pi)Maximum angle width of range image. Only does
lasermodel use this parameter.
Sample¶
roslaunch jsk_pcl_ros sample_border_estimator.launch