HeightmapMorphologicalFiltering¶
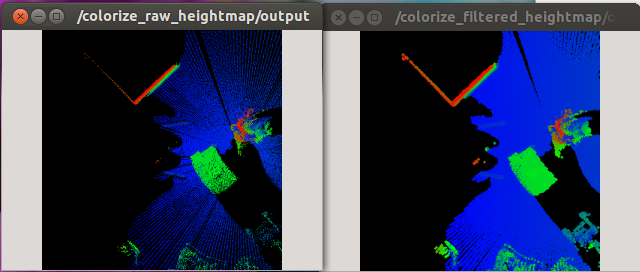
Apply morphological filtering and average filter to fill small holes in pointcloud which is represented as heightmap.
Subscribing Topic¶
~input(sensor_msgs/Image)Input heightmap. Hole should be represented as
-FLT_MAXornan.Encoding should be
32FC2.~input/config(jsk_recognition_msgs/HeightmapConfig)Config topic.
This topic name is automatically resolved by
~inputtopic name.
Publishing Topic¶
~output(sensor_msgs/Image)Output heightmap.
~output/config(jsk_recognition_msgs/HeightmapConfig)Config topic.
This node just relays
~input/config.
Parameters¶
~max_queue_size(Integer, default:10):Max queue size of subscription callback.
~mask_size(Integer, default:2):Size of kernel operator of average filtering.
~max_variance(Double, default:0.1):Allowable max variance in kernel operator
~smooth_method(String, default:average_variance)You can choose method of smoothing from
average_varianceandaverage_distance.~use_bilateral(Bool, default:false)use bilateral filtering after smooth(interpolation) method
~bilateral_filter_size(Integer, default:5)Kernel size of bilateral filtering.
~bilateral_sigma_color(Double, default:0.04)filter sigma of color space.
~bilateral_sigma_space(Double, default:5)filter sigma of coordinate space.
Sample¶
roslaunch jsk_pcl_ros sample_heightmap_morphological_filtering.launch