NormalDirectionFilter¶
 NormalDirectionFilter
NormalDirectionFilter
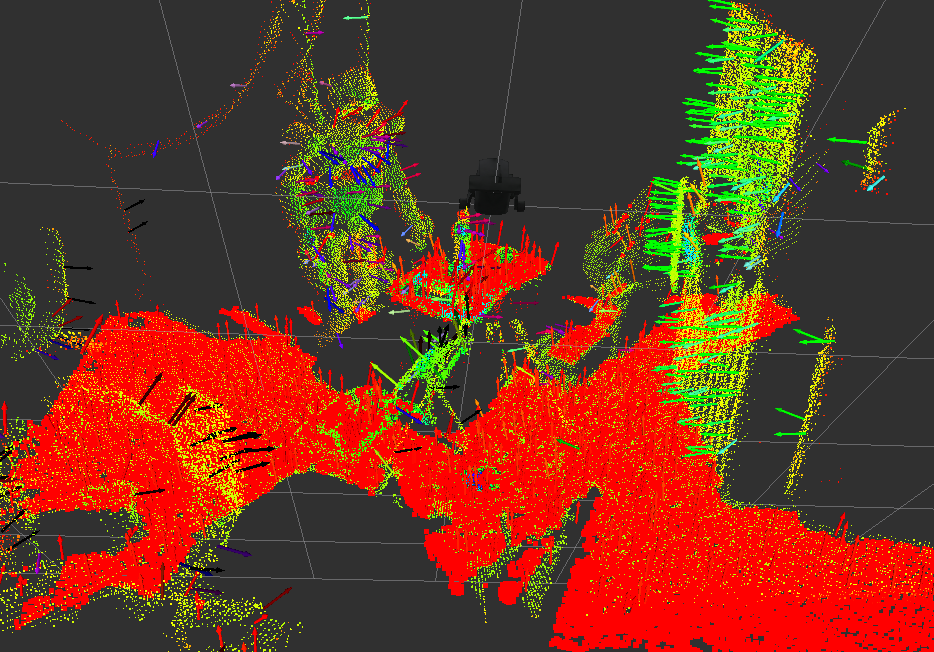
jsk_pcl/NormalDirectionFilter filters pointcloud based on the direction of the normal.
It can filter pointcloud based on 1) static direction and 2) direction based on imu linear_acceleration.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)input normal pointcloud. Point type is
pcl::Normal.~input_imu(sensor_msgs/Imu)imu message, which is enabled if
~use_imuparameter is true
Publishing Topics¶
~output(pcl_msgs/PointIndices)result of filtering as indices. You can use
pcl/ExtractIndicesto get pointcloud of the indices.
Parameters¶
~use_imu(Boolean, default:False):Enable
~input_imutopic and set target direction based on imu linear acceleration.~eps_angle(Double, default:0.2):Allowed angle difference in [rad] to regard the normal as required direction.
This parameter can be changed by
dynamic_recofigure.~angle_offset(Double, default:0.0):Offset parameter to the angle difference.
This parameter can be changed by
dynamic_recofigure.~direction(Double Array, required):if
~use_imuis false, the direction should be specified with this parmaeter.~queue_size(Integer, default:200):The length of input queue.
Sample¶
roslaunch jsk_pcl_ros sample_normal_direction_filter.launch