ExtractIndices¶
What Is This¶
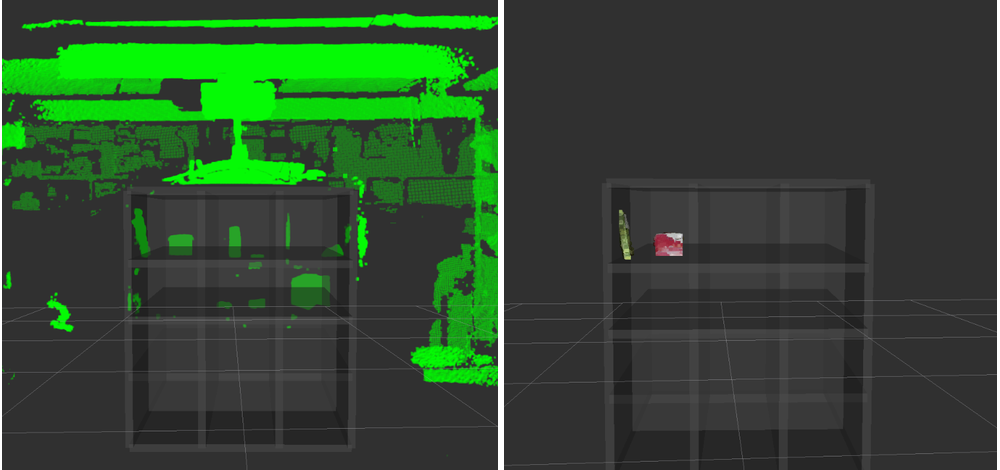
ExtractIndices extracts point cloud with input point indices.
Upstream package pcl_ros has similar node which extracts point cloud with point indices. (see here)
The pros of this node compared to it are:
supports
keep_organizedoption when extract cloud.connected-based system. (does not subscribe without child subscriber)
other params.
max_queue_size,approximate_syncsupport simple command line interface. (you can run with
rosrun)
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)
Original depth information from which you extract some of them.
~indices(pcl_msgs/PointIndices)
Indices for point cloud you extract.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)
Extracted point cloud.
Parameter¶
keep_organized(Boolean, default:false)
Set keep_organized when extract indices.
negative(Boolean, default:false)
Set negative when extract indices.
max_queue_size(Int, default:10)
Max queue size for subscribers.
approximate_sync(Boolean, default:false)
If this parameter is true, ~input and ~indices are synchronized with approximate time policy.
Sample¶
roslaunch jsk_pcl_ros sample_attention_clipper.launch