Snapit¶
What Is This¶
This node finds the nearest plane from input pose and publish pose aligned to that plane.
Subscribing Topic¶
~input/polygons(jsk_recognition_msgs/PolygonArray)Input latest plane polygon.
This topic should be synchronized with
~input/polygon_coefficients.~input/polygon_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)This topic should be synchronized with
~input/polygons, but no data in this topic is used for now.~input/plane_align(geometry_msgs/PoseStamped)Input pose.
When this topic is subscribed,
~output/plane_alignedwill be published.~input/convex_align(geometry_msgs/PoseStamped)Input pose.
When this topic is subscribed,
~output/convex_alignedwill be published.~input/convex_align_polygon(geometry_msgs/PolygonStamped)Plane polygon.
When this topic is subscribed,
~output/convex_aligned_pose_arraywill be published.
Publishing Topic¶
~output/plane_aligned(geometry_msgs/PoseStamped)Pose aligned to nearest plane.
~output/convex_aligned(geometry_msgs/PoseStamped)Similar to
~output/plane_aligned, but just relay~input/convex_alignwhen the foot of the perpendicular line is not in any of input planes.~output/convex_aligned_pose_array(geometry_msgs/PoseArray)Array of pose of all vertices of input polygon.
Advertising Service¶
~align_footstep(jsk_recognition_msgs/SnapFootStep)Service API.
Each pose is treated like
~input/convex_align.
Parameters¶
~use_service(Bool, default:False)Whether to enable
~align_footstep.
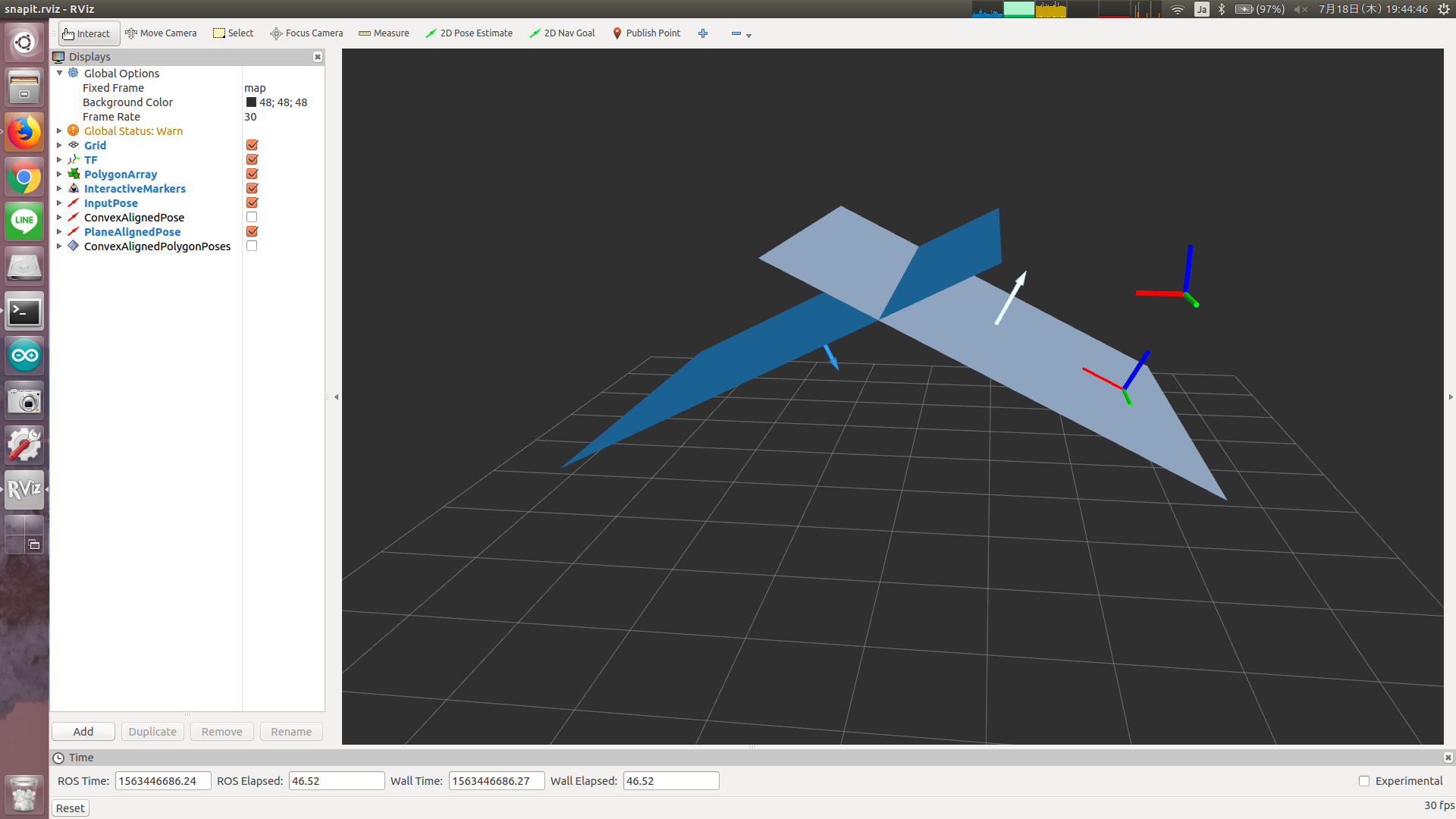
Sample¶
roslaunch jsk_pcl_ros sample_snapit.launch