OrganizedMultiPlaneSegmentation¶
What Is This¶
 images/organized_multi_plane_segmentation.png
images/organized_multi_plane_segmentation.png
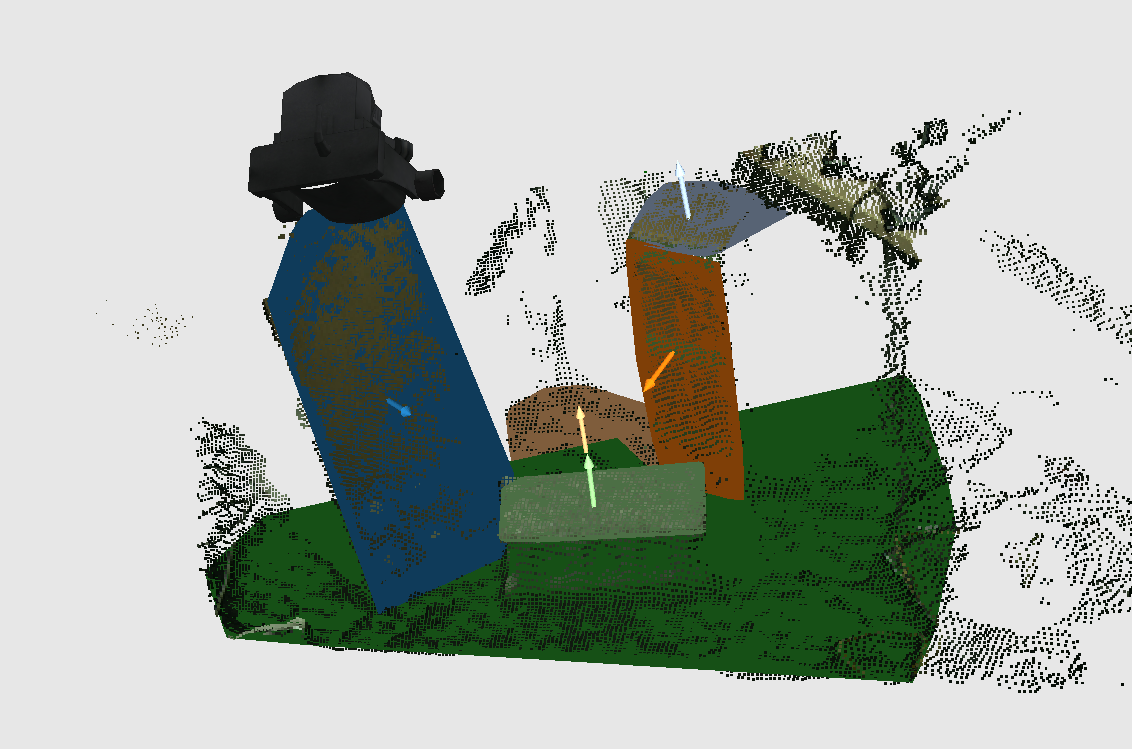
This nodelet segments multiple planes from organized pointcloud.
It estimates planes based on connected-component analysis
using pcl::OrganizedMultiPlaneSegmentation.
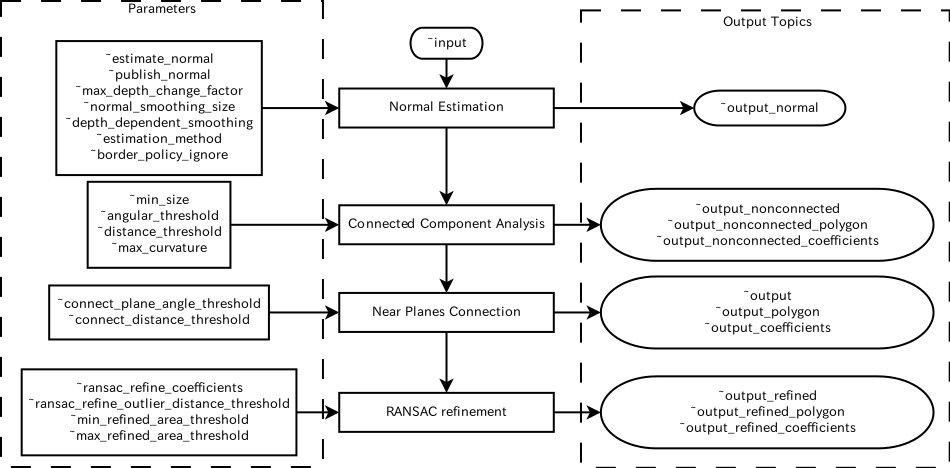 overview shows the overview of the pipeline.
overview shows the overview of the pipeline.
Estimate normal using integral image.
Conduct connected component analysis to estimate planar regions.
Connect neighbor planes if the normal directions and the borders of the planes are near enough.
Refine plane coefficients of connected planes based on RANSAC. If the areas of the planes after refinement are too small, they will be removed.
These process is implemented in one nodelet in order not to convert pointcloud between PCL and ROS.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):Input pointcloud. This should be organized pointcloud.
Publishing Topics¶
~output(jsk_recognition_msgs/ClusterPointIndices):~output_polygon(jsk_recognition_msgs/PolygonArray):~output_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)The inliers, coefficients and convex polygons of the connected polygons.
~output_nonconnected(jsk_recognition_msgs/ClusterPointIndices):~output_nonconnected_polygon(jsk_recognition_msgs/PolygonArray):~output_nonconnected_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)The inliers, coefficients and polygons of the polygons of connected components analysis.
~output_refined(jsk_recognition_msgs/ClusterPointIndices):~output_refined_polygon(jsk_recognition_msgs/PolygonArray):~output_refined_coefficients(jsk_recognition_msgs/ModelCoefficientsArray)The inliers, coefficients and convex polygons of the refined polygons.
~output_normal(sensor_msgs/PointCloud2):The pointcloud of normal of
~inputpointcloud.Point type is
pcl::Normal.
Parameters¶
~estimate_normal(Boolean, default:True):Estimate normal if it is set to
True~publish_normal(Boolean, default:False):Publish the result of normal to
~output_normal~max_depth_change_factor(Double, default:0.02):The depth change threshold for computing object borders in normal estimation.
~normal_smoothing_size(Double, default:20.0):the size of the area used to smooth normals (depth dependent if
~depth_dependent_smoothingis true)~depth_dependent_smoothing(Boolean, default:False)Smooth normal depending on depth
~estimation_method(Integer, default:1)Estimation method of normal. You can choose one of
AVERAGE_3D_GRADIENT(0),COVARIANCE_MATRIX(1)andAVERAGE_DEPTH_CHANGE(2).~border_policy_ignore(Boolean, default:True)Ignore border if this is
True~min_size(Integer, default:2000)Minimum number of the points on a planar region during connected component analysis. We recommend smaller size for this parameter in order to get stable result.
~angular_threshold(Double, default:0.05)~distance_threshold(Double, default:0.01)Distance and angular threshold in connected component analysis.
~max_curvature(Double, default:0.001)The maximum curvature allowed for a planar region
~connect_plane_angle_threshold(Double, default:0.2)~connect_distance_threshold(Double, default:0.01)These parameters affect near plane connection. OrganizedMultiPlaneSegmentation connects planes which have near normal direction and whose boundaries are near enough.
~ransac_refine_coefficients(Boolean, default:True)Conduct RANSAC refinment for each plane if it is true.
~ransac_refine_outlier_distance_threshold(Double, default:0.1)Outlier threshold of RANSAC refinment for each plane.
~min_refined_area_threshold(Double, default:0.04)~max_refined_area_threshold(Double, default:10000)Minimum and maximum area threshold for each convex polygon.
Sample¶
roslaunch jsk_pcl_ros sample_organized_multi_plane_segmentation.launch