RGBColorFilter¶
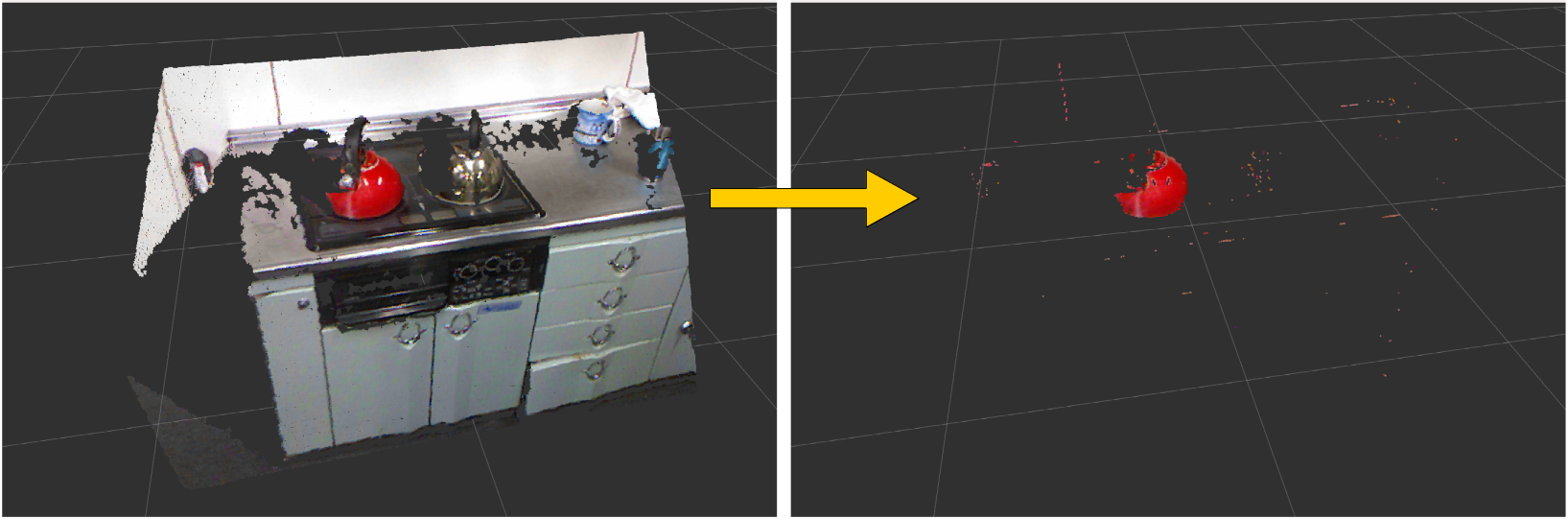
Filter pointcloud based on RGB range.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. rgb field is required.
~indices(pcl_msgs/PointIndices)Indices of pointcloud. only available if
~use_indicesis true.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Filtered pointcloud.
Parameters¶
~keep_organized(Bool, default:False)Whether to publish organized point cloud if possible.
~use_indices(Bool, default:False)If true, apply filter only in
~indicesregion.~r_max(Integer, default:255)~r_min(Integer, default:0)~g_max(Integer, default:255)~g_min(Integer, default:0)~b_max(Integer, default:255)~b_min(Integer, default:0)Color range to filter.
Sample¶
roslaunch jsk_pcl_ros rgb_color_filter_sample.launch