DepthImageCreator¶
What is this¶
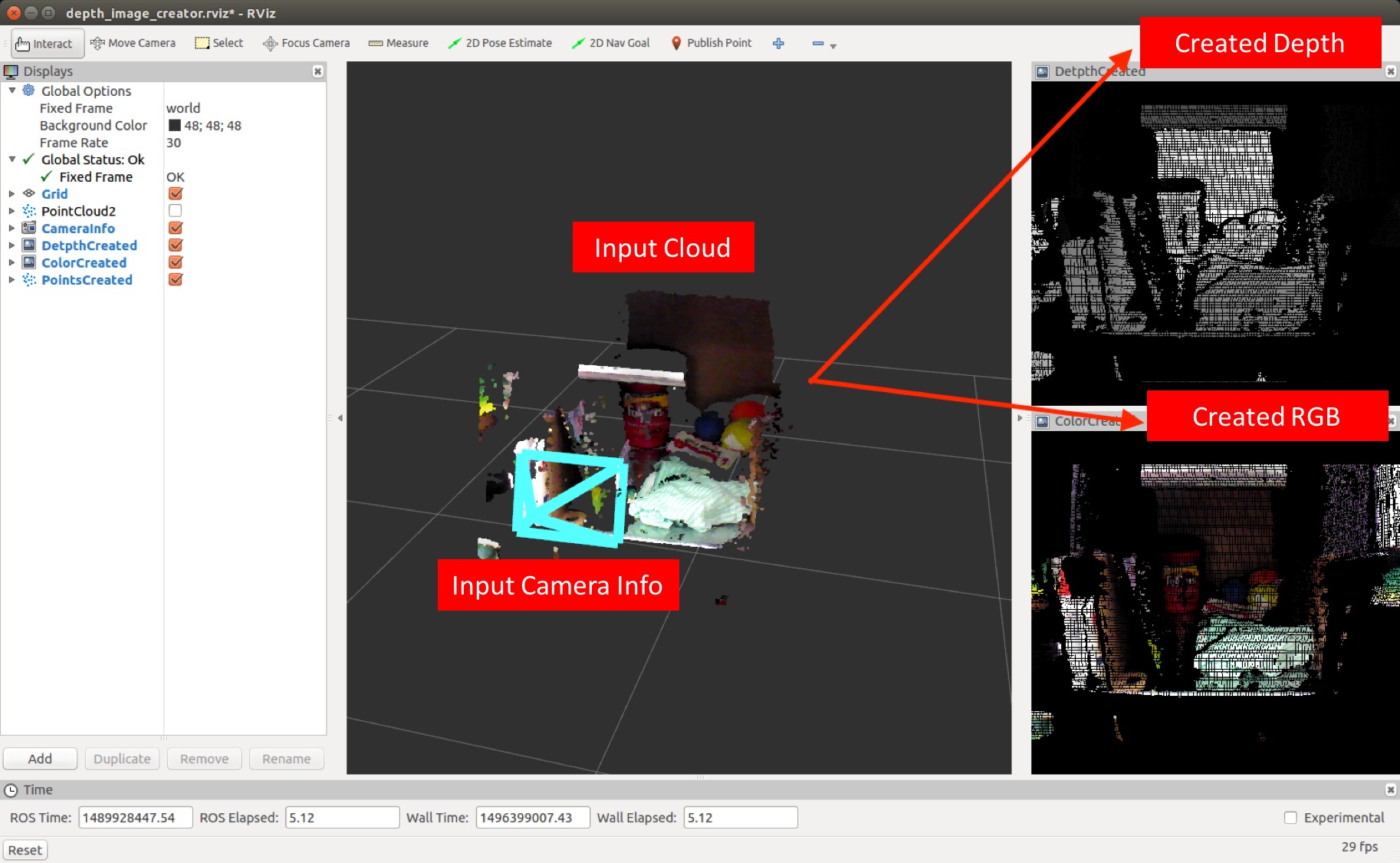
Create organized pointcloud from non-organized pointcloud.
Currently it supports pcl::PointXYZ and pcl::PointXYZRGB as the input.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):The input pointcloud to be reconstructed as organized pointcloud.
~info(sensor_msgs/CameraInfo):Put a simulated camera according to
~infoand generate organized pointcloud.
Publishing Topics¶
~output(sensor_msgs/Image):Publish organized pointcloud as depth image.
~output_image(sensor_msgs/Image):Publish image colorized according to the input cloud.
~output_cloud(sensor_msgs/PointCloud2)Output pointcloud.
See
~organize_cloudparameter.~output_disp(sensor_msgs/DisparityImage)Publish organized pointcloud as disparity image.
Parameters¶
~scale_depth(Double, default:1.0)scale depth value.
~use_fixed_transform(Boolean, default:False):~translation(Array of double, default:[0, 0, 0])~rotation(Array of double, default:[0, 0, 0, 1])If
~use_fixed_transformis set toTrue, transformation between~inputand~infois not resolved via tf but fixed transformation is used according to~rotationandtranslation.~use_asynchronous(Boolean, default:False)If this parameter is set to
True, this node process incoming PointCloud regardless of the synchronization between~inputand~info.~use_approximate(Boolean, default:False)Synchronize
~inputand~infoapproximately if this parameter is set toTrue. If this parameter is set toFalse, and the timestamps of the~inputand~infoare not strictly matched, the callback will not be processed. (See http://wiki.ros.org/message_filters/ApproximateTime)~info_throttle(Integer, default:0)The number of
~infomessages to skip to generate depth image.~max_queue_size(integer, default:100):Queue length for synchronization of topics. According to the message_filters synchronization policy, in case of
~input(1Hz) and~info(30Hz) comes, message_filters needs at least over 30 queue_size for searching a synchronized set of the two. (You can also check like thisrosrun jsk_topic_tools is_synchronized --approximate-sync --queue-size 3 /kinect_head/depth_registered/camera_info /kinect_head/depth_registered/points)~max_pub_queue_size(integer, default:~max_queue_size_):Queue length of topic publishers. Default is value set for
max_queue_size_.~max_sub_queue_size(integer, default:~max_queue_size_):Queue length of topic subscribers. Default is value set for
max_queue_size_.~fill_value(float, default:nan):Initial value of depth image. The pixels where there is no corresponding point are filled by this value.
~organize_cloud(Boolean, default:False)Whether to organize
~output_cloudor not.~tf_duration(float, default:0.001):TF Lookup transform duration. This value is only used when
use_fixed_transformisfalse.
Sample¶
roslaunch jsk_pcl_ros sample_depth_image_creator.launch