OrganizedEdgeDetector¶
What is this?¶
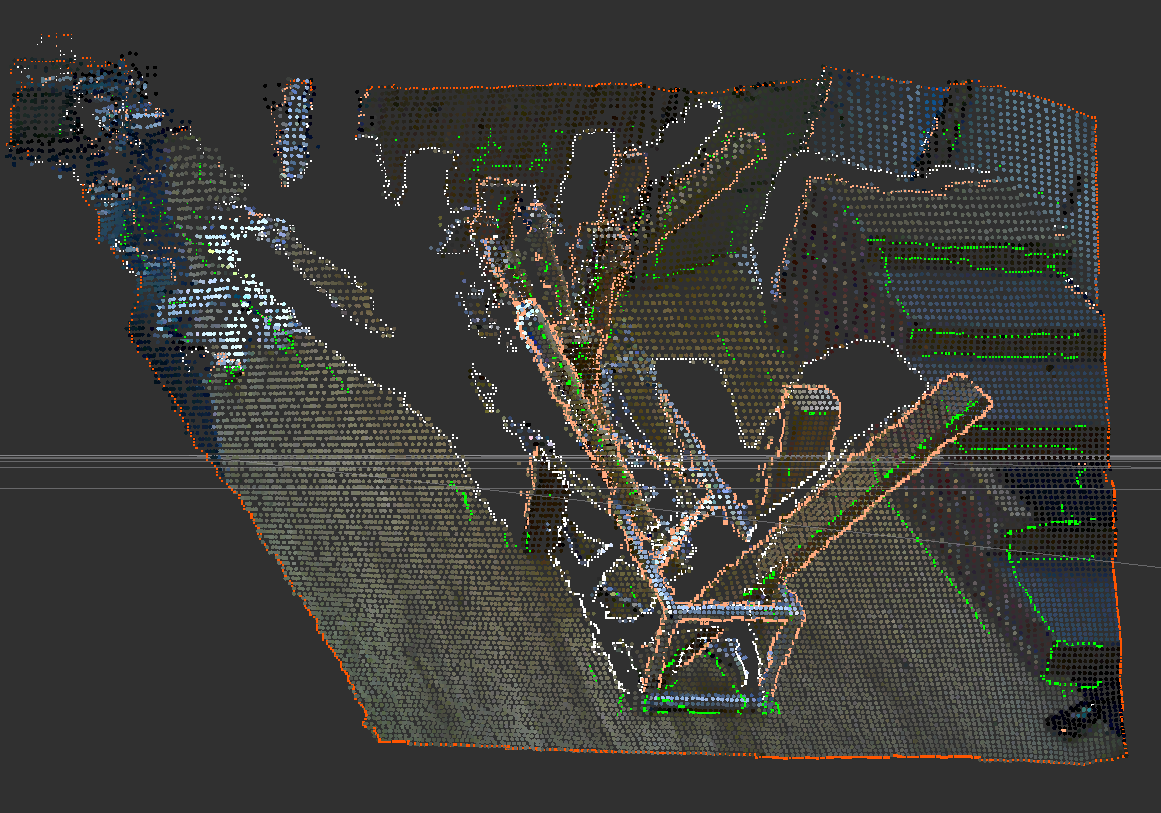
Detect edges from organized point cloud.
Note
This node requires PCL > 1.7.2.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input organized point cloud.
Publishing Topics¶
~output_normal(sensor_msgs/PointCloud2)Estimated normal of whole point cloud.
Point type is
pcl::Normal.This topic is published only when
~publish_normalistrue.~output_nan_boundary_edge_indices(pcl_msgs/PointIndices)~output_occluding_edge_indices(pcl_msgs/PointIndices)~output_occluded_edge_indices(pcl_msgs/PointIndices)~output_curvature_edge_indices(pcl_msgs/PointIndices)~output_rgb_edge_indices(pcl_msgs/PointIndices)~output_indices(pcl_msgs/PointIndices)Output edge indices.
~output_indicesmeans all of the edge indices above.~output_nan_boundary_edge(sensor_msgs/PointCloud2)~output_occluding_edge(sensor_msgs/PointCloud2)~output_occluded_edge(sensor_msgs/PointCloud2)~output_curvature_edge(sensor_msgs/PointCloud2)~output_rgb_edge(sensor_msgs/PointCloud2)~output(sensor_msgs/PointCloud2)Output point cloud of edge.
~outputmeans all of the edge point cloud above.~output_straight_edges_indices(jsk_recognition_msgs/ClusterPointIndices)Cluster indices containing straight edges.
This topic is published only when
~use_straightline_detectionistrue.~edge_image(sensor_msgs/Image)~hough_image(sensor_msgs/Image)Debug image. Visualize the input and output image of
cv::HoughLinesP.These topics are published only when
~use_straightline_detectionistrueand~publish_debug_imageistrue.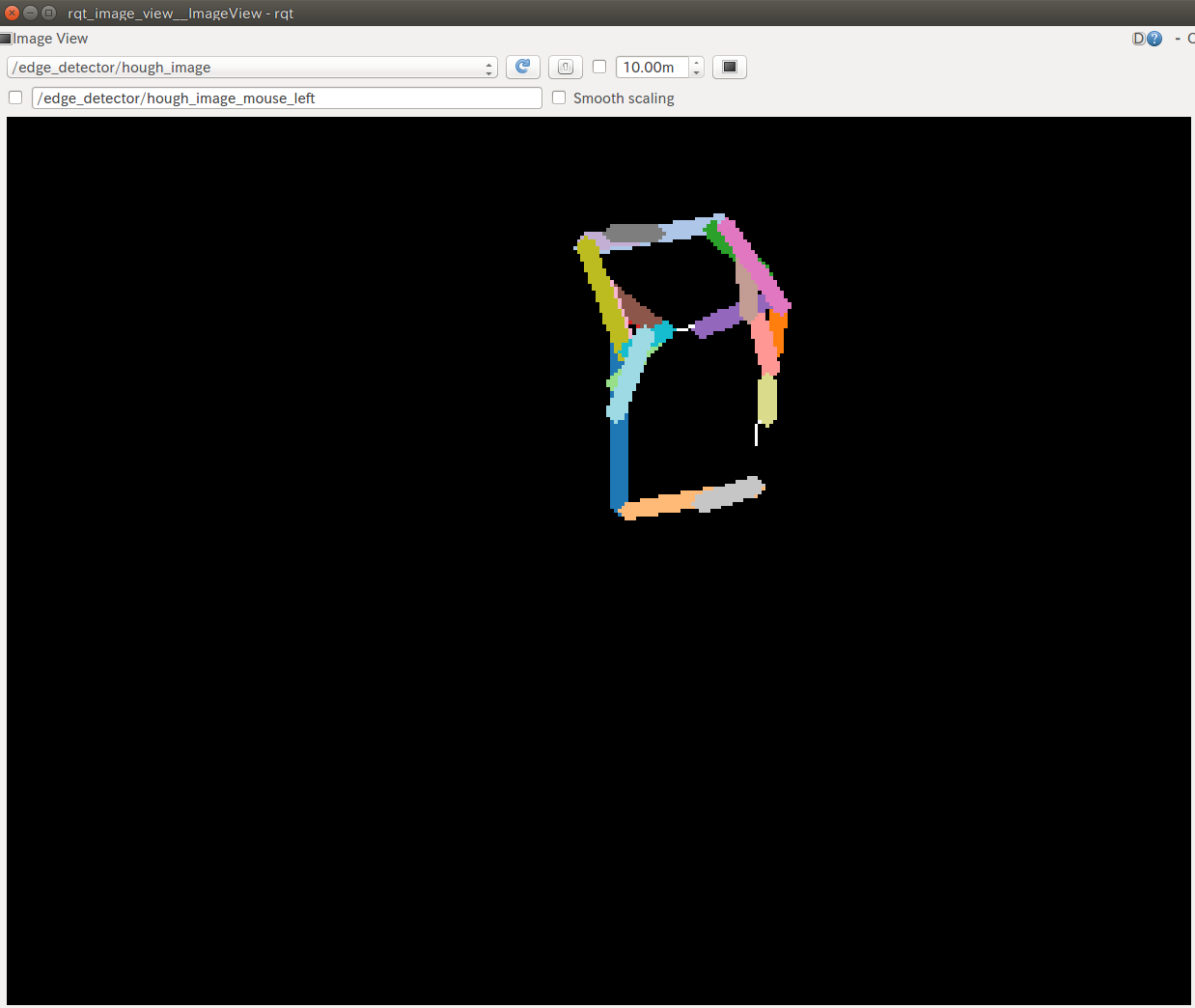
Parameters¶
Parameters for estimating normal¶
~publish_normal(Boolean, default:false)Publish normal pointcloud or not.
~max_depth_change_factor, (Double, default:0.02)Max depth change factor.
~normal_smoothing_size, (Double, default:20.0)Normal smoothing size parameter.
~estimation_method, (Int, default:1)Estimation method.
Choose from
AVERAGE_3D_GRADIENT(1),COVARIANCE_MATRIX(1)andAVERAGE_DEPTH_CHANGE(2).~depth_dependent_smoothing(Boolean, default:false)Use depth dependent smoothing.
~border_policy_ignore(Boolean, default:true)Ignore border policy.
Parameters for estimating edge¶
~max_search_neighbors(Int, default:100)The maximum search distance for deciding occluding and occluded edges
~depth_discontinuation_threshold(Double, default:0.04)Threshold about depth discontinuation between neighboring points in meters.
~use_nan_boundary(Boolean, default:false)Add NAN Boundary Edge to estimating edge type
~use_occluding(Boolean, default:true)Add Occluding Edge to estimating edge type
~use_occluded(Boolean, default:true)Add Occluded Edge to estimating edge type
~use_curvature(Boolean, default:true)Add High Curvature Edge to estimating edge type
~use_rgb(Boolean, default:false)Add RGB Canny Edge to estimating edge type
Parameters for estimating straight edge¶
~use_straightline_detection(Boolean, default:true)Estimate Straight Lines or not.
~rho(Double, default:1)Distance resolution of the accumulator in pixels.
~theta(Double, Default:1)Angle resolution of the accumulator in degrees.
~straightline_threshold(Int, default:50)The minimum number of intersections to ‘detect’ a line.
~min_line_length(Double, default:50)The minimum number of points that can form a line.
Lines with less than this number of points are disregarded.
~max_line_gap(Double, default:10)The maximum gap between two points to be considered in the same line.
~publish_debug_image(Boolean, default:true)Publish Debug Images.
Sample¶
roslaunch jsk_pcl_ros sample_organized_edge_detector.launch