vgg16_object_recognition.py¶
What is this?¶
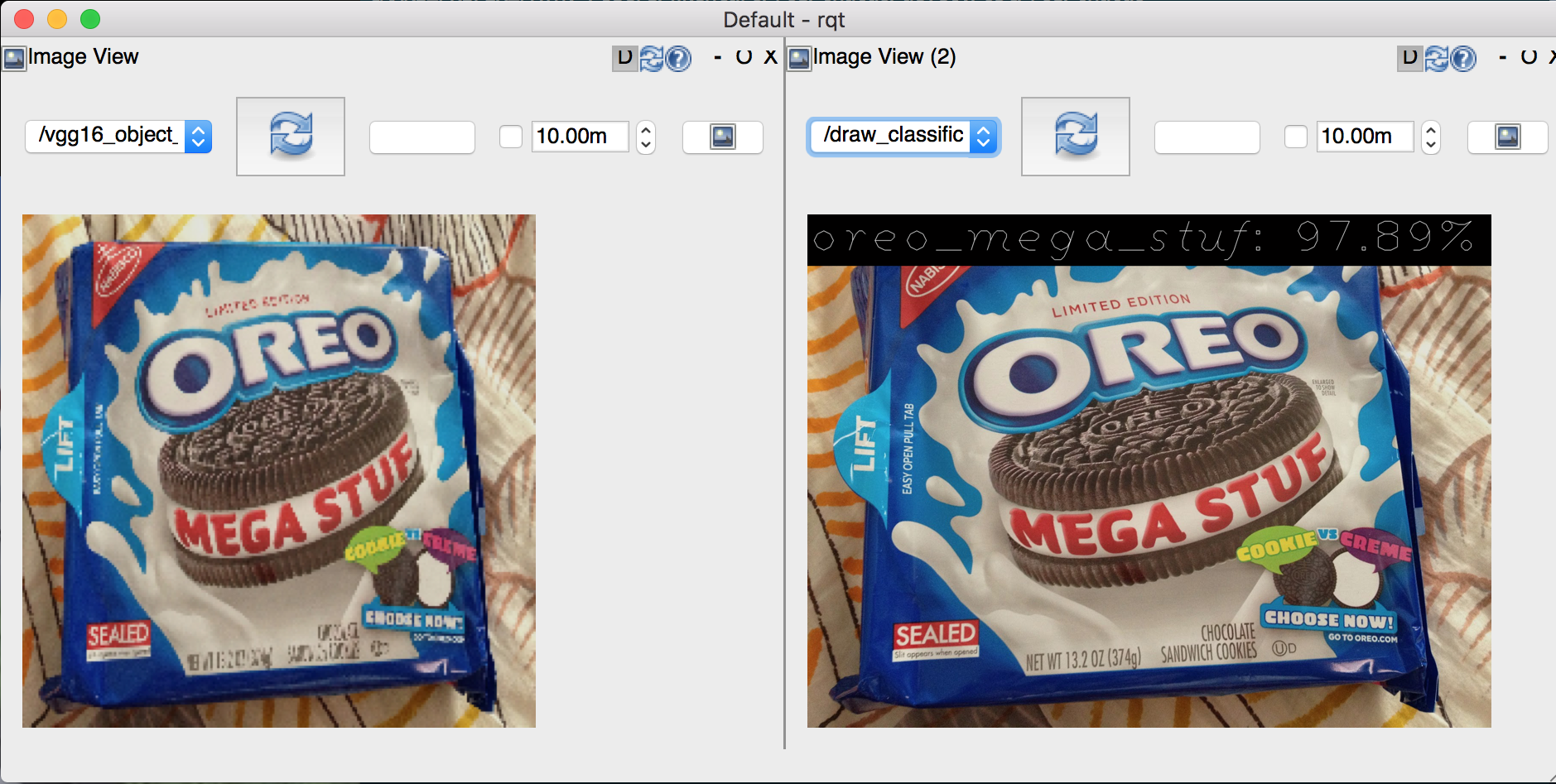
Recognize object with VGG16 net by resizing input image to 224 x 224. This node requires pretrained chainer model. For training VGG16 net, please refer to wkentaro/vgg16
Subscribing Topic¶
~input(sensor_msgs/Image)Input image.
Publishing Topic¶
~output(jsk_recognition_msgs/ClassificationResult)Classification result of input image.
~debug/net_input(sensor_msgs/Image)Resized image to 224 x 224.
Parameters¶
~gpu(Int, Default:-1)GPU id.
-1represents CPU mode.~target_names(List of String, Required)Target names for classification.
~model_name(String, Required)Currently
vgg16orvgg16_batch_normalizationis only supported. See models in$(rospack find jsk_recognition_utils)/python/jsk_recognition_utils/chainermodels.~model_file(String, Required)Trained model file.
use_mask(Bool, Default:False)If true, topic
~input/maskis enabled.~approximate_sync(Bool, Default:False)Use approximate synchronization policy.
~queue_size(Int, Default:10)Queue size for synchronization.
~slop(Float, Default:0.1)Slop for approximate sync.
Example¶
roslaunch jsk_perception sample_vgg16_object_recognition.launch