mask_rcnn_instance_segmentation.py¶
What is this?¶
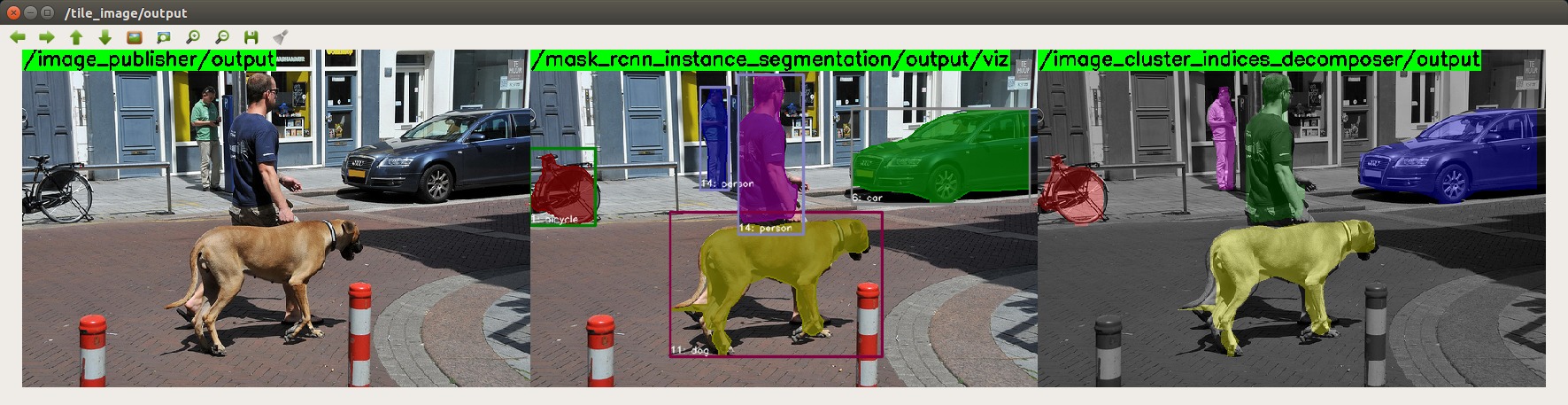
Predict object instance masks and labels.
Subscribing Topic¶
~input(sensor_msgs/Image)Raw image.
Publishing Topic¶
~output/cluster_indices(jsk_recognition_msgs/ClusterPointIndices)Image indices of each instance.
~output/labels(jsk_recognition_msgs/LabelArray)Class labels of each instance.
~output/label_cls(sensor_msgs/Image)Label image color-coded by class.
~output/label_ins(sensor_msgs/Image)Label image color-coded by instance.
~output/viz(sensor_msgs/Image)Visualized image of recognition result.
~output/class(jsk_recognition_msgs/ClassificationResult)Class information of detected objects
~output/rects(jsk_recognition_msgs/RectArray)Rectangles of detected objects
Parameters¶
~gpu(Int, default:0)GPU id.
~model_name(String,mask_rcnn_resnet50)Model name.
mask_rcnn_resnet50,mask_rcnn_fpn_resnet50andmask_rcnn_fpn_resnet101are supported.~score_thresh(Float, default:0.7)Score threshold of detections.
~fg_class_names(List of String,None)Foreground class names that is used to identify number of class. It is also used for the
namefield of~output/labels. Whenpretrained_model: cocois set, default COCOpretrained_modelandfg_class_nameswill be loaded. Whenpretrained_model: vocis set, default VOCpretrained_modelandfg_class_nameswill be loaded.~pretrained_model(String, required)Pretrained model path. When
pretrained_model: cocois set, default COCOpretrained_modelandfg_class_nameswill be loaded. Whenpretrained_model: vocis set, default VOCpretrained_modelandfg_class_nameswill be loaded.~classifier_name(String, default:rospy.get_name())Name of this classifier
~anchor_scales(List, default:[4, 8, 16, 32])Anchor scales parameter for Mask RCNN.
~min_size(Int, default:600)Min size parameter of the input image for Mask RCNN.
~max_size(Int, default:1000)Max size parameter of the input image for Mask RCNN.
Sample¶
roslaunch jsk_perception sample_mask_rcnn_instance_segmentation.launch gpu:=0 COCO:=true # COCO dataset (~80 classes)
roslaunch jsk_perception sample_mask_rcnn_instance_segmentation.launch gpu:=0 COCO:=false # VOC dataset (~20 classes)
Launch¶
roslaunch jsk_perception mask_rcnn_instance_segmentation.launch gpu:=0 COCO:=true INPUT_IMAGE:=/camera/color/image_raw