fcn_depth_prediction.py¶
What is this?¶
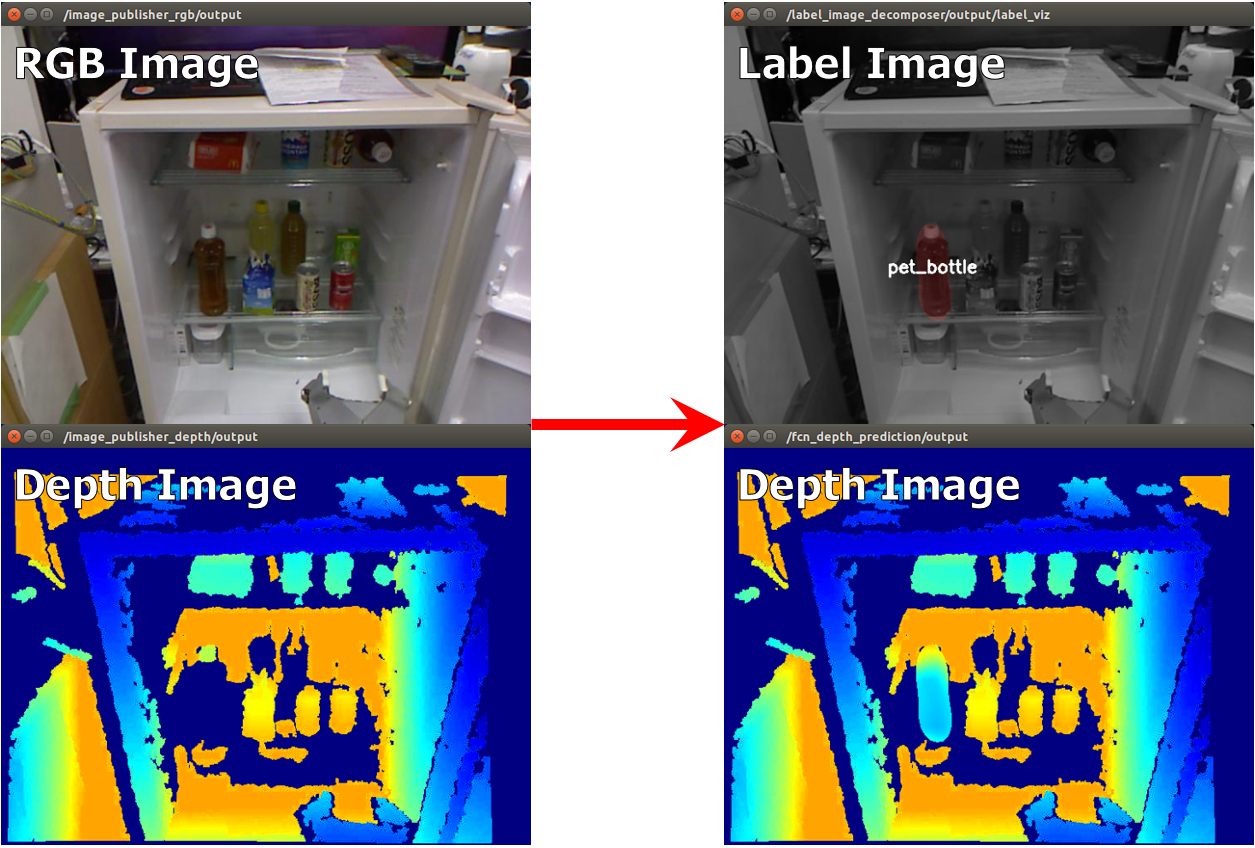
Predict depth of transparent object in pixel-wise with Fully Convolutional Networks.
Subscribing Topic¶
~input(sensor_msgs/Image)Raw RGB image.
~input/depth(sensor_msgs/Image)Raw depth image.
Publishing Topic¶
~output(sensor_msgs/Image)Output depth image. The value of each pixel is equal to
~output/depth_pred_rawin the region labeled as transparent, otherwise equal to~input/depth. The image encoding is 32FC1.~output/label(sensor_msgs/Image)Output label image. Each object is segmented according to param
~target_names.~output/proba_image(sensor_msgs/Image)Probability image of each object predicted according to param
~target_names. If the number of classes including background is XX, then the image encoding is 32FCXX.~output/depth_pred_raw(sensor_msgs/Image)Predicted whole depth image. This is used for generating
~output. The image encoding is 32FC1.
Parameters¶
~backend(String, Default:chainer)Framework for neural networks. Currently, only
chaineris supported.~gpu(Int, Default:-1)GPU id.
-1represents CPU mode.~target_names(List of String, Required)Target names for classification.
~model_name(String, Required)Currently,
fcn8s_depth_predictionandfcn8s_depth_prediction_concat_firstare supported.~model_file(String, Required)Saved .npz file for trained model.
~bg_label(Int, default:0)Label value for background. This is used with rosparam
~proba_threshold~proba_threshold(Float, default:0.0)Threshold for labeling pixels as uncertain, and the uncertain region will be labeled as background with rosparam
~bg_label.~queue_size(Int, default:10)How many messages you allow about the subscriber to keep in the queue. This should be big when there is much difference about delay between two input topics.
~approximate_sync(Bool, default:False)Whether to use approximate for input topics.
~slop(Float, default:0.1)How many seconds you allow about the difference of timestamp. This is used only when param
~approximate_syncistrue.
Sample¶
roslaunch jsk_perception sample_fcn_depth_prediction.launch