RectArrayActualSizeFilter¶
Filter jsk_recognition_msgs/RectArray with actual size based on depth image.
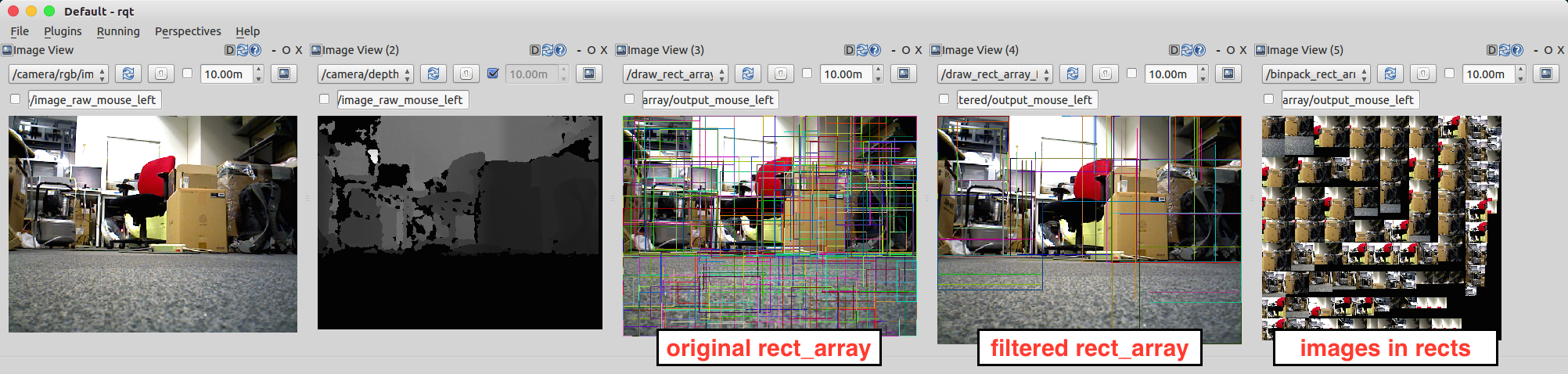
Sample is selective_search_depth_image_filter.launch.
Subscribing Topics¶
~input(jsk_recognition_msgs/RectArray)Input array of rectangle regions.
~input/depth_image(sensor_msgs/Image)Input depth image.
~input/info(sensor_msgs/CameraInfo)Intrinsic camera parameter of the depth image.
Publishing Topics¶
~output(jsk_recognition_msgs/RectArray)Filtered array of rectangle regions.
Parameters¶
~approximate_sync(bool, default:False)Synchronize timestamps of input topics approximately.
~kernel_size(Integer, default:3)Kernel size to take average of distance.
~min_x~max_x~min_y~max_yMinimum and maximum size of x (width) and y (height) axis in meter unit.
Sample¶
roslaunch jsk_perception sample_rect_array_actual_size_filter.launch