kalman-filtered-objectdetection-marker.l¶
What is this?¶
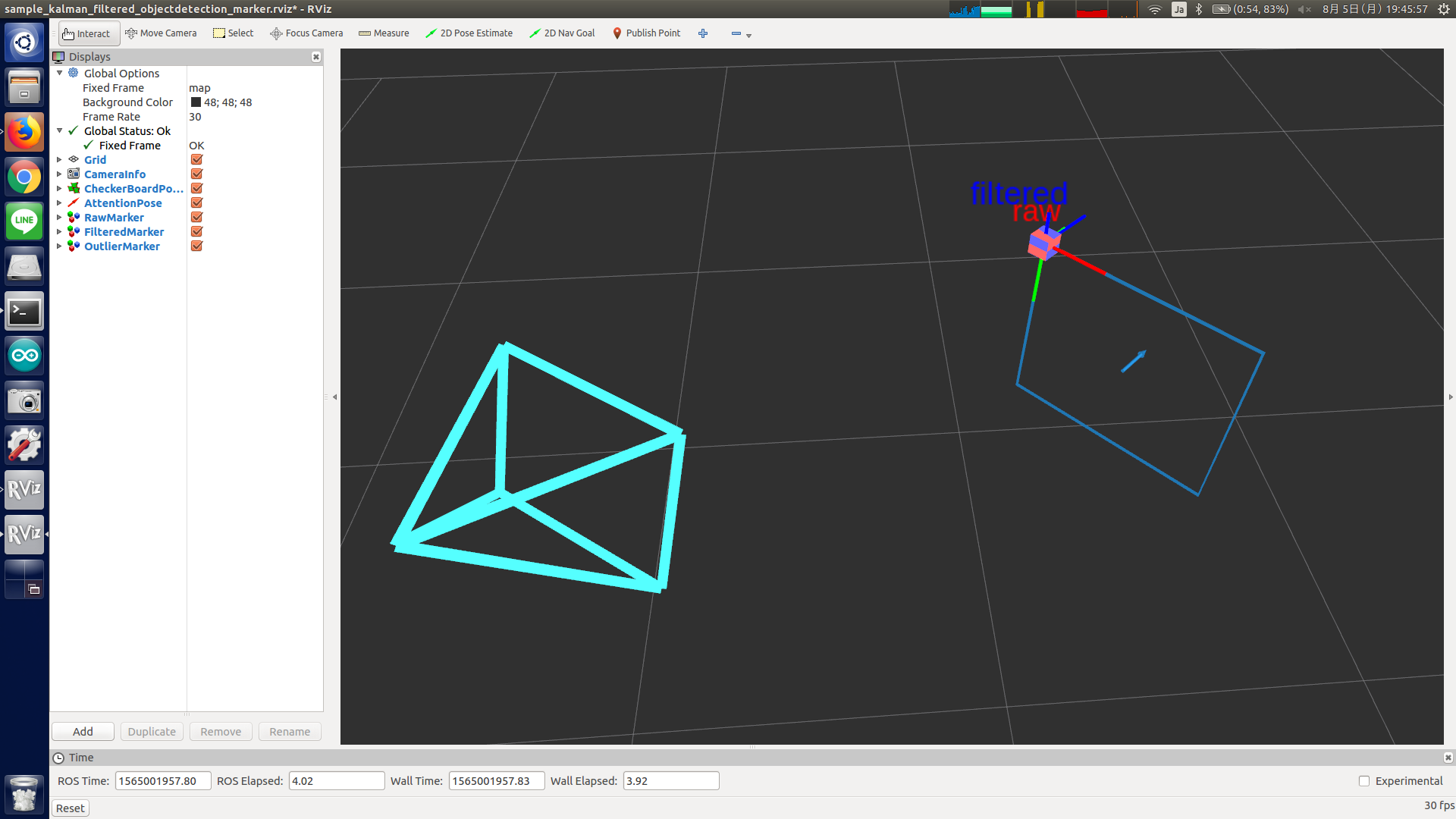
Apply kalman filter to posedetection_msgs/ObjectDetection message and show marker.
Subscribing Topic¶
input/ObjectDetection(posedetection_msgs/ObjectDetection)Result of object detection.
input/image(sensor_msgs/Image)Trigger topic to publish dummy pose to
attention_clipper/input/pose.input/switch(std_msgs/Bool)Whether to subscribe
input/ObjectDetection.
Publishing Topics¶
object_detection_marker_array(visualization_msgs/MarkerArray)Marker of raw pose.
filtered(visualization_msgs/MarkerArray)Marker of filtered pose.
outlier(visualization_msgs/MarkerArray)Marker of outlier.
attention_clipper/input/pose(geometry_msgs/PoseStamped)Pose of detected object.
posewithcovstamped(geometry_msgs/PoseWithCovarianceStamped)simplecov(geometry_msgs/PoseWithCovarianceStamped)Pose of detected object with covariance.
Advertising Service¶
targetobj(posedetection_msgs/TargetObj)Service API to return object pose.
Parameters¶
~object_width(Float, default:0)~object_height(Float, default:0)Width/height of object.
~relative_pose(String, default:0 0 0 0 0 0 1)Relative pose.
~detection_topic(String, default:/kinect_head/rgb/ObjectDetection)This parameter is not used for now.
~marker_life(Float, default:300)Life time of marker in seconds.
~base_frame_id(String, default:/base_footprint)Frame ID of base.
~target_type(String, default:"")Target type.
Sample¶
roslaunch jsk_perception sample_kalman_filtered_objectdetection_marker.launch