fisheye_ray.py¶
What is this?¶
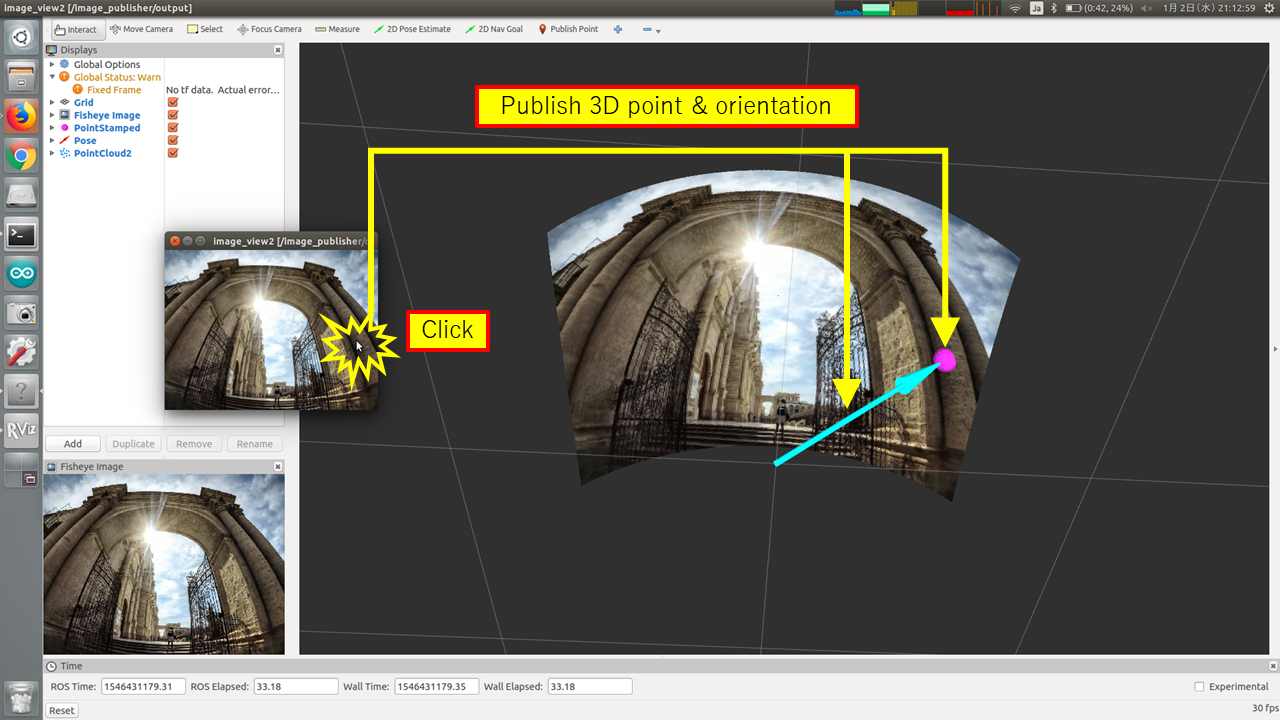
Subscribe a 2D point of an fisheye image and publish orientation of the point in 3D space.
Subscribing Topic¶
image(sensor_msgs/Image)Input fisheye image.
clicked_point(geometry_msgs/PointStamped)Index of the pixel of
image.Only
xandyfield are used for computing orientation, andzfield is ignored.camera_info(sensor_msgs/CameraInfo)Not used now.
Publishing Topic¶
~output(geometry_msgs/PoseStamped)Orientation of
clicked_pointin 3D space.~output_point(geometry_msgs/PointStamped)3D point 1m distant from
~frame_idorigin, which expresses the orientation
Parameters¶
~frame_id(String, default:fisheye)Frame ID of published messages.
Sample¶
roslaunch jsk_perception sample_fisheye_ray.launch