paper_finder¶
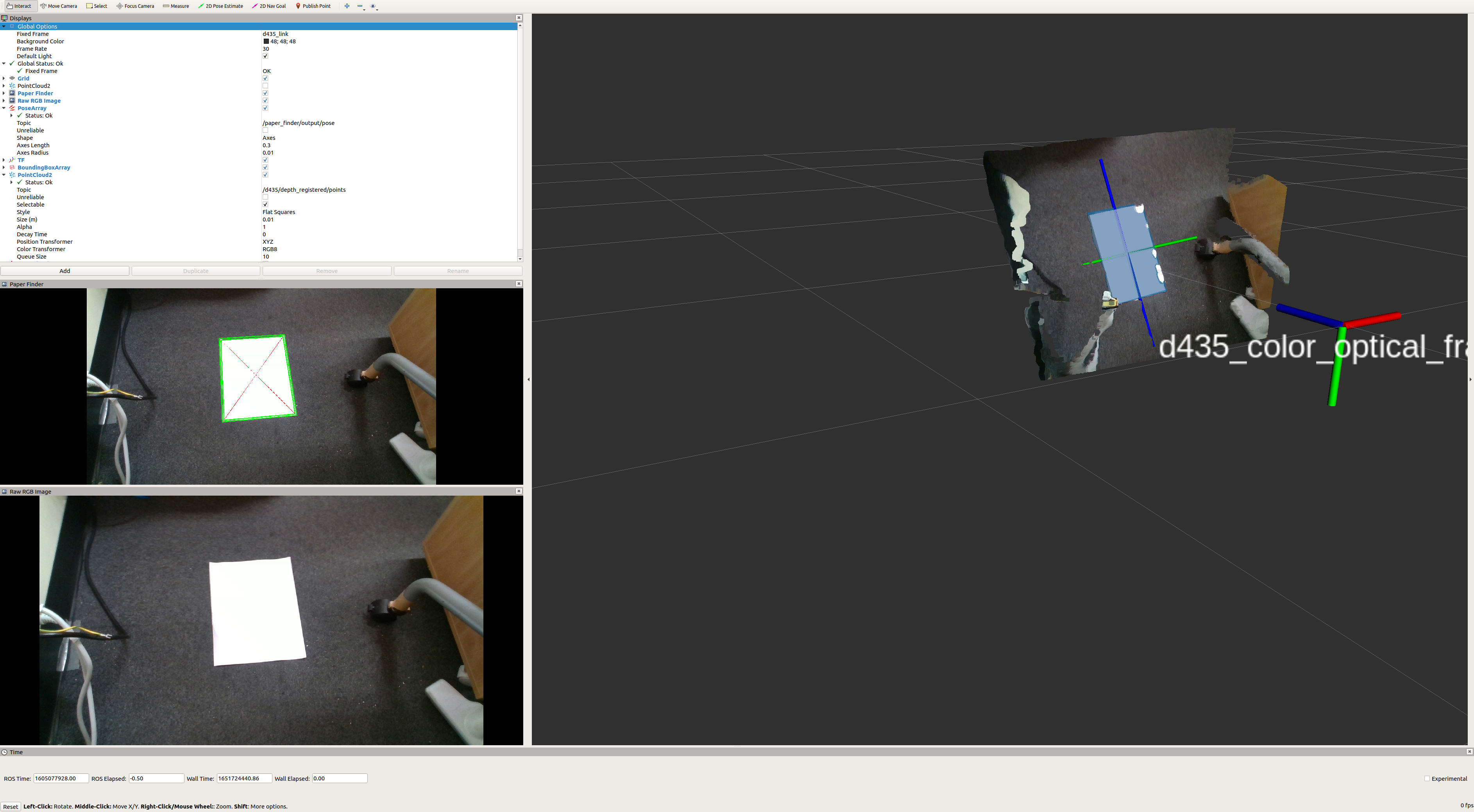
Detect papers (rectangle) and publish posearray.
Subscribing Topic¶
~input(sensor_msgs/Image)Input image.
~input/depth(sensor_msgs/Image)Input depth image. Subscribed if
~with_depthistrue.~input/camera_info(sensor_msgs/CameraInfo)Camera info. Subscribed if
~with_depthistrue.
Publishing Topics¶
~output/viz(sensor_msgs/Image)Visualization of recognition result in image.
~output/pose(geometry_msgs/PoseArray)Recognized paper pose.
~output/boxes(jsk_recognition_msgs/BoundingBoxArray)Recognized Bounding Box.
~output/length(std_msgs/Float32MultiArray)Recognized the rectangle sides of paper.
Parameters¶
~angle_tolerance(float default:286.4788975654116)
286.4788975654116 = np.rad2deg(5.0)
~area_tolerance(float default:0.1)~rect_x(float default:0.210)
0.210 [m] is the width of A4 paper.
~rect_y(float default:0.297)
0.297 [m] is the hight of A4 paper.
~length_tolerance(float default:0.04)~queue_size(int default:10)~with_depth(bool default:true)If true, use the depth of the detected square apex position for pose estimation.
~approximate_sync(bool default:true)If true, approximately synchronize inputs. Required if
~with_depth:=true.~slop(float default:0.1)The slop time in second for
message_filters.ApproximateTimeSynchronizer. Required if~with_depth:=trueand~approximate_sync:=true.
Sample¶
roslaunch jsk_perception sample_paper_finder.launch