craft_node.py¶
What is this?¶
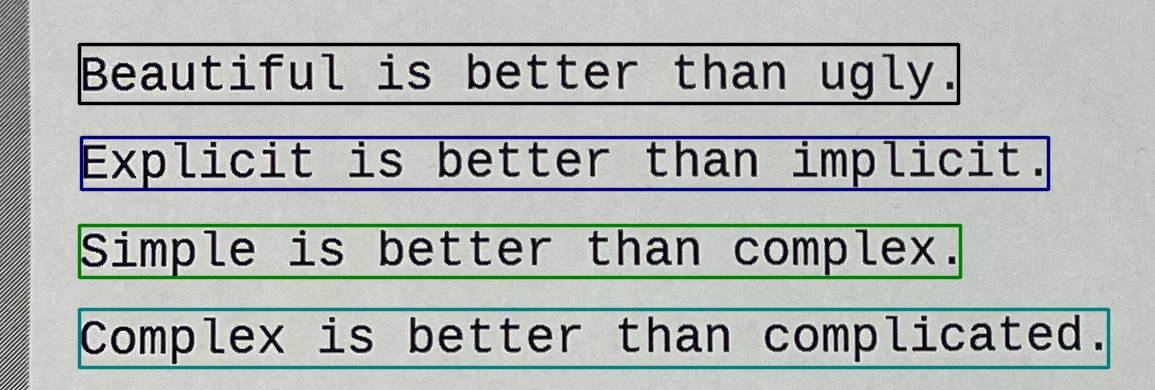
Detect text region from image.
This is a ROS node for CRAFT: Character-Region Awareness For Text detection.
In order to use this feature, you need to install pytorch (pytorch >= 1.9.0 is recommended). However, python2 user is not supposed to be able to install that version of torch. For python2 users, download the appropriate wheel file in your environment from https://download.pytorch.org/whl/cu90/torch_stable.html (melodic) and install with pip as follow:
pip install --user torch-1.1.0-cp27-cp27mu-linux_x86_64.whl
pip install --user torchvision-0.3.0-cp27-cp27mu-manylinux1_x86_64.whl
Subscribing Topic¶
~input(sensor_msgs/Image)Raw image.
Publishing Topic¶
~output/cluster_indices(jsk_recognition_msgs/ClusterPointIndices)Image indices of each detected text region.
~output/rects(jsk_recognition_msgs/RectArray)Rectangles of detected texts.
~output/polygons(jsk_recognition_msgs/PolygonArray)Polygons of detected texts. Unlike
RectArray, this is output as a list of points on a 2D plane.
Parameters¶
~gpu(Int, default:0)GPU id.
-1represents CPU mode.~model_path(String, required)Pretrained model path.
~refine_model_path(String, required)Pretrained link refiner model path.
~text_threshold(Double, default:0.70)Text confidence threshold
~text_low_bound_score(Double, default:0.40)Text low bound score
~link_threshold(Double, default:0.1)Link confidence threshold
~mag_ratio(Double, default:1.5)Image magnification ratio.
~max_image_size(Int, default:1280)Max image size for inference
Sample¶
roslaunch jsk_perception sample_craft_node.launch