hand_pose_estimation_2d.py¶
What is this?¶
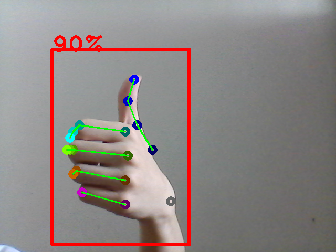
Estimate hand pose in 2d. Please refer to original paper.
In order to use this feature, you need to install pytorch (pytorch >= 1.4.0 is recommended).
Subscribing Topic¶
~input(sensor_msgs/Image)Input image.
~input/depth(sensor_msgs/Image)Input depth image.
~input/info(sensor_msgs/CameraInfo)Input camera info.
Publishing Topic¶
~output/vis(sensor_msgs/Image)Visualization image of detected hand poses.
~output/pose(jsk_recognition_msgs/HandPoseArray)If
with_depthis true, publish 3D joint position.If
with_depthis false, publish 2D joint position in image.~output/pose_2d(jsk_recognition_msgs/HandPoseArray)If
with_depthis true, publish 2D joint position.
Parameters¶
~gpu(Int, Default:-1)GPU id.
-1represents CPU mode.~thre1(Float, Default:0.3)Threshold of hand bounding box heatmap value.
~thre2(Float, Default:0.2)Threshold of hand keypoint heatmap value.
~thre3(Int, Default:5)Threshold of undetected keypoints quantity.
~visualize(Bool, Default:True)If
~visualizeis true, draw estimated hand keypoints.~model_file(String, Required)Trained SRHandNet model file.
~with_depth(Bool, Default:False)If true, subscribe
~input/depthand~input/info.~sync_camera_info(Bool, Default:False)Synchronize
~input/infoif enabled, otherwise the last received camera info message is used.~approximate_sync(Bool, Default:True)Use approximate synchronization policy.
~queue_size(Int, Default:10)Queue size for synchronization.
~slop(Float, Default:0.1)Slop for approximate sync.
Example¶
For 2d hand pose detection.
roslaunch jsk_perception sample_hand_pose_estimation_2d.launch gpu:=0
For 3d hand pose detection.
roslaunch jsk_perception sample_hand_pose_estimation_3d.launch gpu:=0
Reference¶
@article{Wang:2019:SRH,
doi = {10.1109/TIP.2019.2955280},
title = {SRHandNet: Real-time 2D Hand Pose Estimation with Simultaneous Region Localization},
journal = {IEEE Transactions on Image Processing},
author = {Yangang Wang, Baowen Zhang and Cong Peng},
number = 1,
month = Oct.,
volume = 29,
year = 2019,
pages = {2977 - 2986},
url = {http://yangangwang.com/papers/WANG-SRH-2019-07.html},
}