DualFisheyeToPanorama¶

Generate panorama image by stitching dual-fisheye camera images. This is ROS wrapper of drNoob13/fisheyeStitcher
Subscribing Topic¶
~input(sensor_msgs/Image)Input dual-fisheye image.
Publishing Topic¶
~output(sensor_msgs/Image)Output panorama image.
Output topic is published by
image_transportplugins, so~output/compressedtopic is also available.
Parameters¶
~image_transport(String, defaultraw)Image transport type for
~inputtopic.You can choose
compressedand so on to subscribe~input/compressedcompressed image.~light_compen(Bool, default: false)Light Fall-off Compensation. The outer edge of the fisheye image has low brightness.
~refine_align(Bool, default: false)Adjusts any discontinuities caused by objects with varying depth in the stitching boundaries. Note that this process takes a large CPU usage.
~fovd(Double, default: 195.0)Field of view of fisheye camera [degree].
~save_unwarped(Bool, default: false)Save unwarped (rectified) fisheye images under
~/.ros. These images are useful to update panorama parameter.~mls_map_path(String, default: “”)Path to .yml.gz file which contains MLS grids information. How to generate this file is explained below.
~blend_image_height(Int, default: 1920)Image size to be used for panorama blending.
~blend_image_width(Int, default: 1920)Image size to be used for panorama blending.
~blend_param_p_wid(Int, default: 55)Parameters used for panorama blending.
~blend_param_p_x1(Int, default: 75)Parameters used for panorama blending.
~blend_param_p_x2(Int, default: 1775)Parameters used for panorama blending.
~blend_param_row_start(Int, default: 590)Parameters used for panorama blending.
~blend_param_row_end(Int, default: 1320)Parameters used for panorama blending.
~output_image_height(Int, default: 2000)Output image size
~output_image_height(Int, default: 2000)Output image size
Sample¶
Before running the sample, please catkin build jsk_perception.
rosrun jsk_perception install_sample_data.py
rosbag play $(rospack find jsk_perception)/sample/data/insta360_air.bag --loop --clock
roslaunch jsk_perception sample_dual_fisheye_to_panorama.launch
Panorama blending will run with high resolution parameters by default. (blending with 3840x1920, output is 4000x2000) This configuration requires lots of CPU power. If you want to run wih low resolution parameters.
roslaunch jsk_perception sample_dual_fisheye_to_panorama.launch resolution_mode:=low
Update panorama parameter¶
This section describes how to update the panorama parameter for generating a panorama image. Note that different cameras basically require different parameters, even if they are of the same type. However, if you’re lucky, you can use the parameters of another camera, so you can try that first.
Here is an example using insta360.
Unwarp and save the left and right fisheye images. The images are
$HOME/.ros/l_img_crop.jpgand$HOME/.ros/r_img_crop.jpg
roslaunch jsk_perception sample_insta360_air.launch use_usb_cam:=true save_unwarped:=true
Annotate the corresponding points of the left and right images. We use labelme as a GUI tool. When annotating, it is easier to start with
l_img_crop.jpg, which has a narrow angle of view thanr_img_crop.jpg.$HOME/.ros/l_img_crop.jsonand$HOME/.ros/r_img_crop.jsonshould be outputted.
sudo pip install labelme==4.5.7
labelme $HOME/.ros/l_img_crop.jpg
labelme $HOME/.ros/r_img_crop.jpg
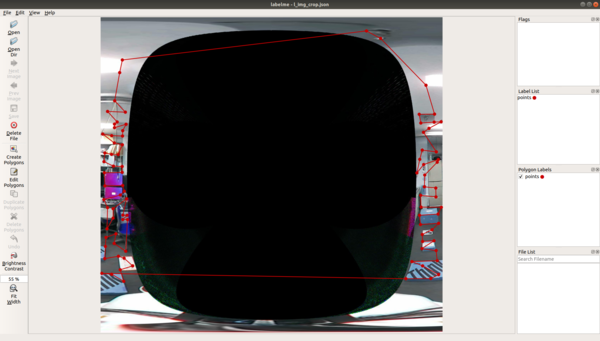 Left image with annotation
Left image with annotation
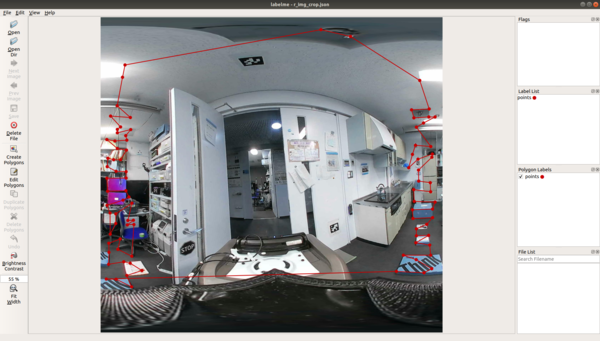 Right image with annotation
Right image with annotation
Save the correspondence points to a matlab file.
rosrun jsk_perception create_mls_correspondence.py
Run
mls_rigid_example2.mto generate the MLS grids file. matlab can be installed from the University of Tokyo license. You also need to install the image processing toolbox and the parallel computing toolbox. Please check the official wiki
matlab -nodisplay -nosplash -nodesktop -r "run('$(rospack find jsk_perception)/scripts/mls_rigid_example2.m');exit"
Convert the MLS grid file to a yaml file so that OpenCV can read it.
rosrun jsk_perception mls_matlab2opencv.py
Compress the yaml file to gz and place it under jsk_perception.
gzip ~/.ros/fisheye_stitcher_grid_xd_yd_3840x1920.yml
mv ~/.ros/fisheye_stitcher_grid_xd_yd_3840x1920.yml.gz $(rospack find jsk_perception)/config/fisheye_stitcher_grid_xd_yd_3840x1920.yml.gz