bof_histogram_extractor.py¶
What is this?¶
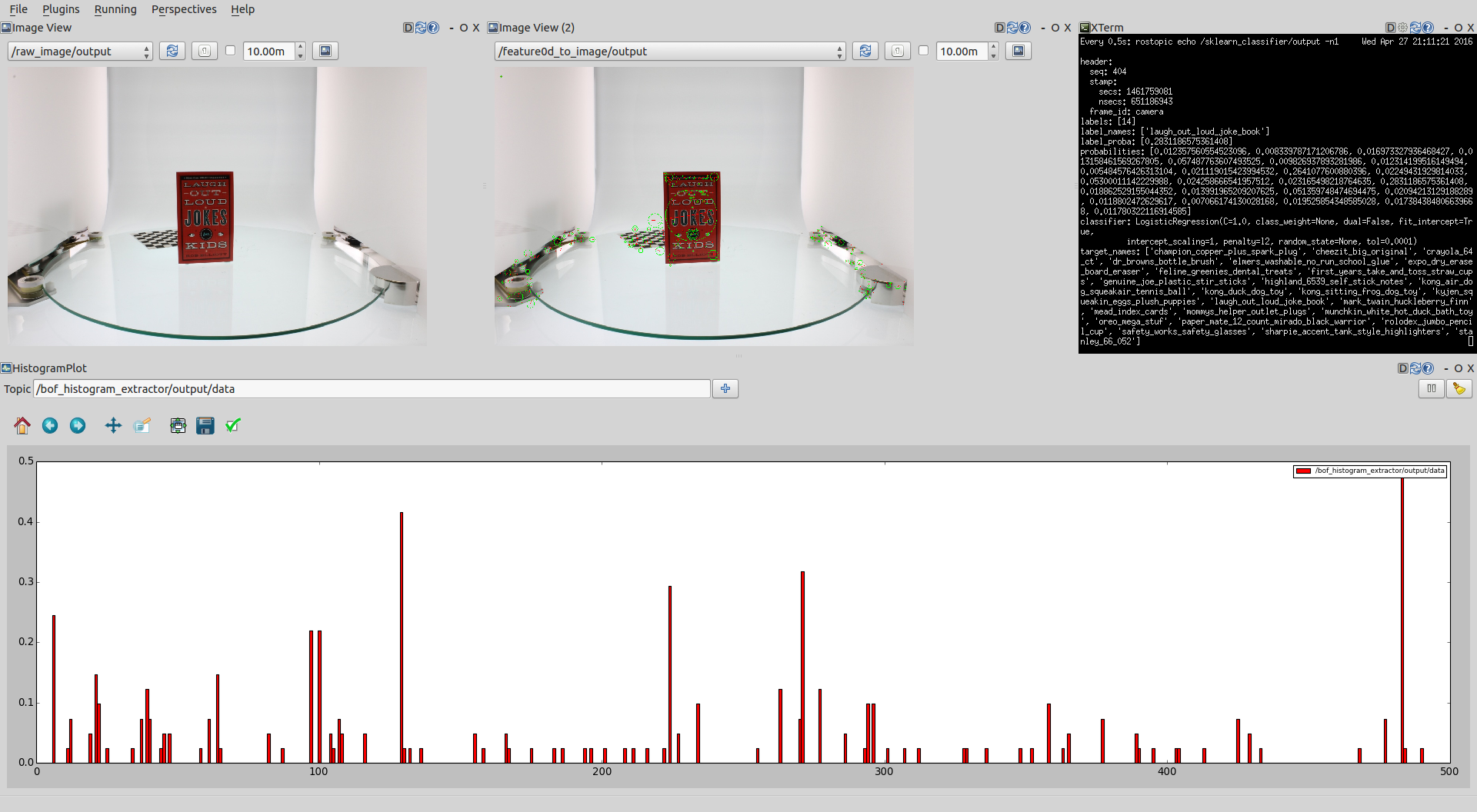
Extract Bag-of-Features histogram.
For other information about object recognition using Bag-of-Features, see here.
Subscribing Topic¶
~input(posedetection_msgs/Feature0D)Feature data.
~input/label(sensor_msgs/Image)Label image with witch features will be extracted.
Publishing Topic¶
~output(jsk_recognition_msgs/VectorArray)Extracted feature data.
Parameters¶
~bof_data(String, required)Path to Bag-of-Features data.
The file contains
jsk_recognition_utils.feature.BagOfFeaturesobject, and it should be pickled and gzipped.~queue_size(Int, default:10)Maximum number of messages which subscriber keeps in the queue.
~approximate_sync(Bool, default:False)Whether to use ApproximateSync for input topics.
~slop(Float, default:0.1)Number of seconds you allow about the difference of timestamp.
This parameter is enabled only when
~approximate_syncisTrue.
Sample¶
roslaunch jsk_perception sample_bof_object_recognition.launch