ocr_node.py¶
What is this?¶
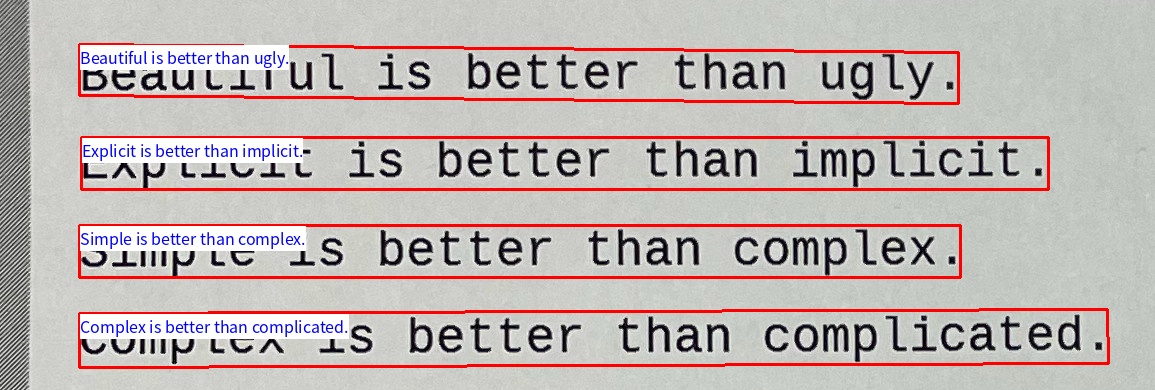
Optical Character Reader (OCR) node from image and text area.
We recommend the python3 environment.
For python2 users, please do pip install pytesseract==0.3.1 manually because the latest version of pytesseract is not installed automatically.
Subscribing Topic¶
~input(sensor_msgs/Image)Raw image.
~input/polygons(jsk_recognition_msgs/PolygonArray)Polygon array representing a text area. If
~subscribe_polygonisTrue, subscribe~input/polygons.~input/rects(jsk_recognition_msgs/RectArray)Rect array representing a text area. If
~subscribe_polygonisFalse, subscribe~input/rects.
Publishing Topic¶
~output(std_msgs/String)Recognized text.
~output/viz(sensor_msgs/Image)Visuzalized OCR results.
~output/labels(jsk_recognition_msgs/LabelArray)The recognized text is output as the label name in the order of the input polygon array or rect array.
~output/debug/viz(sensor_msgs/Image)Tile image of cropped input image.
~output/debug/binary_viz(sensor_msgs/Image)Tile image of a binarized cropped input image.
Parameters¶
~approximate_sync(Bool, default:False)Whether to use approximate for input topics.
~queue_size(Int, default:100)How many messages you allow about the subscriber to keep in the queue. This should be big when there is much difference about delay between two topics.
~slop(Double, Default:0.1)Slop for approximate sync.
~language(Int, Default:eng)OCR target language. In current
ocr_node.pyusestesseract-ocr.If you want to use a language other than English, please install the appropriate language data from packages and change the
languageargument.For example, if you want to use Japanese, please install
tesseract-ocr-jpn(apt install tesseract-ocr-jpninUbuntu) and passjpnas thelanguageargument.~number_of_jobs(Int, Default:-1)Number of jobs for ocr. If this value is
-1, use the value ofmultiprocessing.cpu_count().~font_path(String, default:"")Font path. Specify the font with the characters you want to display.
~font_size(Int, default:16)Font size for visualization
~box_thickness(Int, default:2)Thickness of bounding box (text areas).
~resolution_factor(Double, default:2.0)Factor for resolution of output image. When this option is set as
1.0, an output image has the same resolution as an input image.~interpolation_method(Enum[Int], default:INTER_LANCZOS4)Method for interpolation on input image resizing.
~subscribe_polygon(Bool, Default:False)If
~subscribe_polygonisTrue, subscribe~input/polygons. If~subscribe_polygonisFalse, subscribe~input/rects.
Sample¶
roslaunch jsk_perception sample_craft_node.launch